





面向小曲率曲面的喷涂机器人喷涂轨迹规划中漆膜厚度分布模型的仿真
时间:2017-08-29
阅读:7929
原创

3.4.2漆膜厚度分布模型的仿真
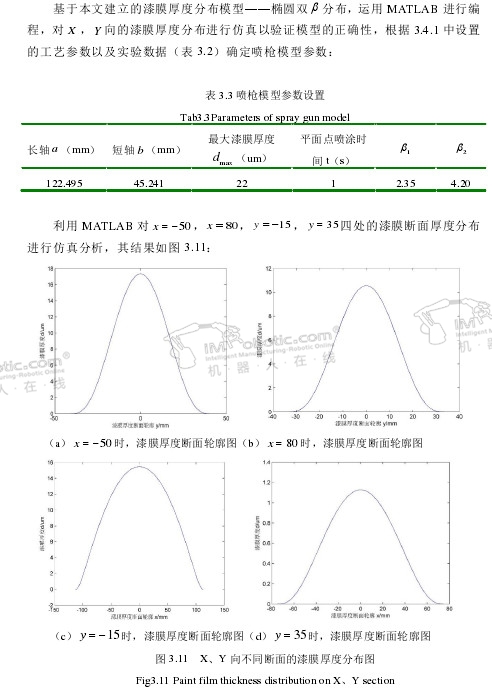
从图3.11中可以看出在任意断面内漆膜厚度均服从β分布与实际喷涂效果相符合,从而验证了本文建立的漆膜厚度分布模型的适用性。
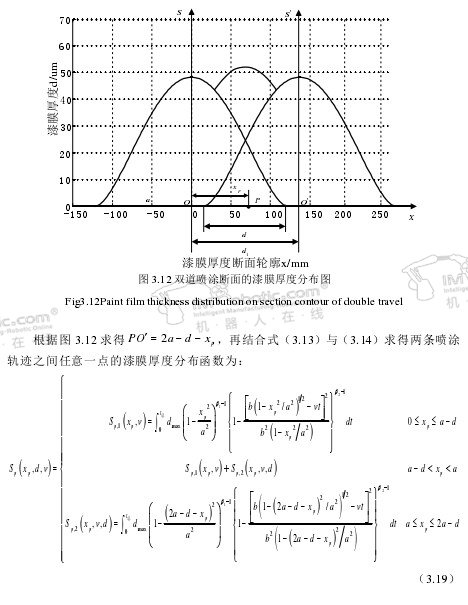
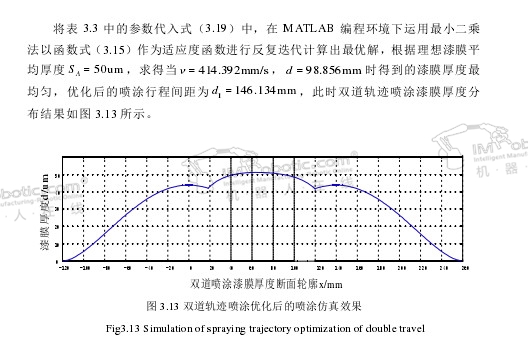
3.4.3平板直线喷涂轨迹优化仿真
在平面漆膜厚度分布模型的基础上对平面进行喷涂轨迹规划及优化仿真,双道喷涂过程漆膜厚度断面分布模型如图3.12所示:
3.5本章小结
本章分析了影响漆膜厚度分布的因素,对平板进行喷涂实验并建立平面上的椭圆双β分布模型;根据建立的喷枪模型,建立喷枪在平面上匀速直线喷涂时的喷涂轨迹优化模型,运用MATLAB求解出最优解;对不同断面漆膜厚度模型进行仿真分析验证了喷枪模型的正确性,并保证了漆膜厚度分布的均匀性。
4圆柱表面上的喷涂机器人喷涂轨迹规划
4.1引言
在第三章中对平面轨迹进行了规划与优化,但在实际喷涂过程中常会遇到圆柱面、球面等规则曲面及自由曲面,因此本章对二次曲面一一圆柱面喷涂轨迹相关问题展开了研究。本章对椭圆双β分布模型进行改进建立了圆柱表面漆膜厚度分布模型,引用点云切片技术研究圆柱表面喷涂轨迹规划与优化算法。
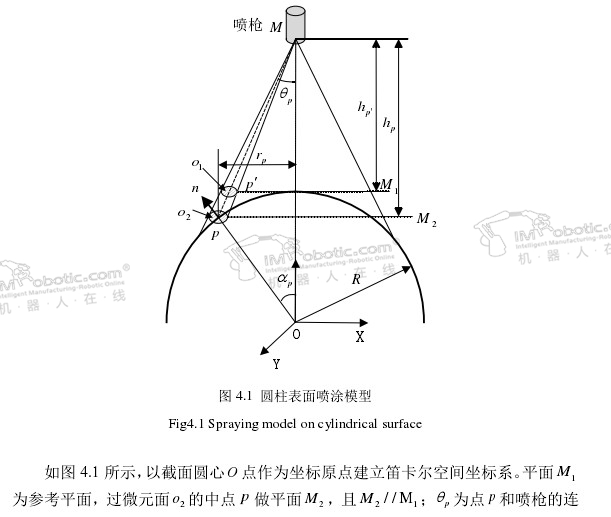
4.2圆柱表面漆膜厚度分布模型
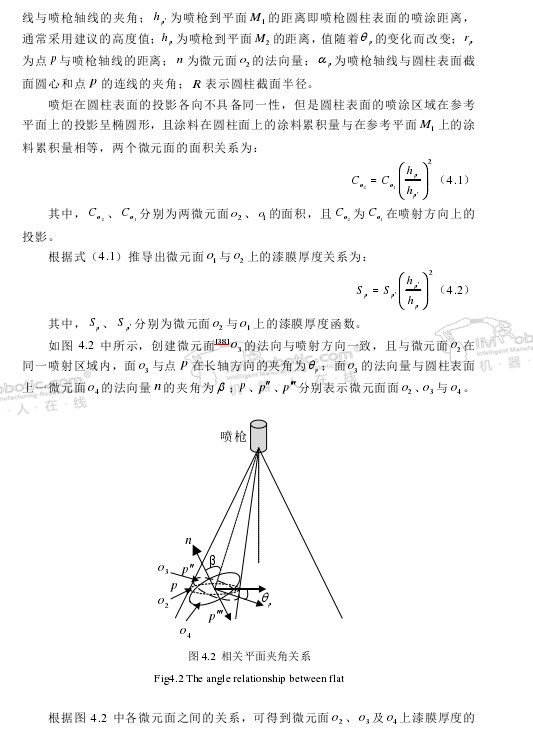
喷涂机器人在实际喷涂过程中,喷枪与工件表面的喷涂距离通常是不变的,因此圆柱表面上每个点的漆膜生长速率函数不会发生改变。本文基于平面上的椭圆双β分布模型,根据微分放大原理运用投影法将改进后的椭圆双β分布模型运用到圆柱表面上,如图4.1所示。

得到圆柱表面漆膜厚度分布模型后,接下来引用点云切片算法和漆膜厚度分布模型对圆柱表面进行喷涂轨迹规划与优化研究。
4.3基于点云切片技术圆柱表面的喷涂轨迹规划
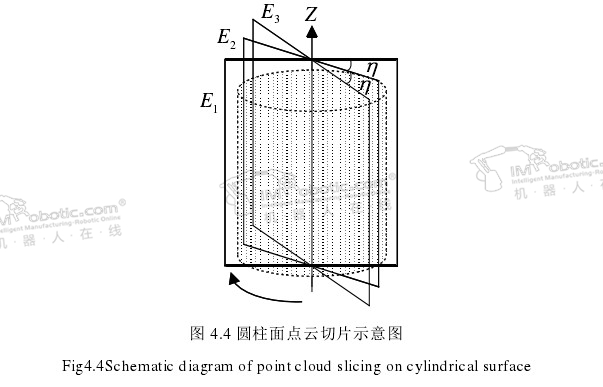
三维扫描仪采集得到工件的点云模型是离散化的工件表面形状特征信息的表达,这些空间散乱点用空间集合表示为:

喷涂机器人
面向小曲率曲面的喷涂机器人喷涂轨迹规划
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









