





喷涂机器人中小曲率曲面上的喷涂轨迹规划
时间:2017-08-29
阅读:7522
原创

5小曲率曲面上的喷涂轨迹规划
5.1引言
喷涂机器人在实际工业生产中除了平面、二次曲面还会遇到小曲率曲面,例如车身、机身、电机等大型产品表面,因此本章在前文研究的基础上重点研究小曲率曲面漆膜厚度分布模型与喷涂轨迹规划及优化算法。
5.2小曲率曲面漆膜厚度分布模型的建立
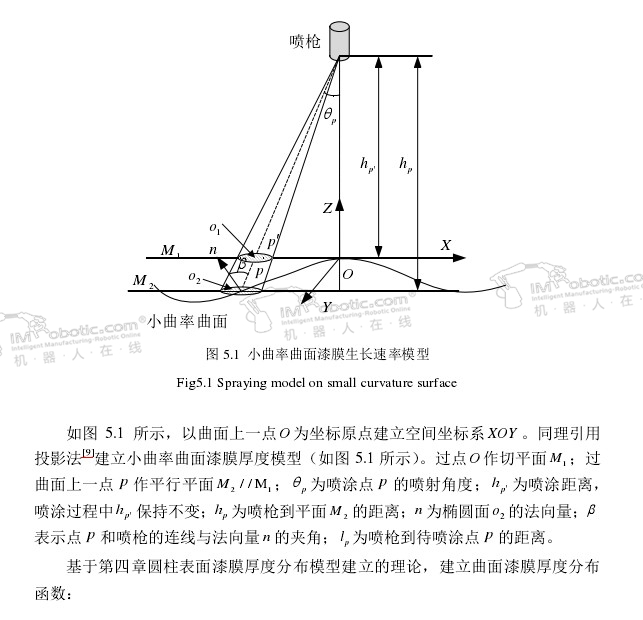

建立小曲率曲面漆膜厚度分布模型后,接下来本章结合点云切片算法与曲面漆膜厚度分布模型对曲面上的喷涂轨迹规划与优化算法进行研究。
5.3小曲率曲面的喷涂轨迹规划
5.3.1切片方向及厚度的确定
根据切片原则可判断小曲率曲面属于对切片方向不敏感的曲面类型,因此本章根据曲面点云法向变化规律确定切平面以及切片方向,如图5.2所示。
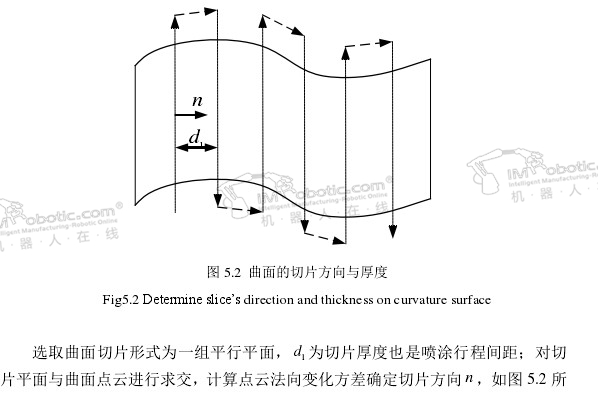
示,切片方向为切平面的法向。为快速确定切片方向也可以根据观察曲面表面曲率变化规律来确定。根据以上方法获得的切片方向不仅减少喷涂过程中喷枪姿态的变化,而且提高了喷涂轨迹规划效率与喷涂质量。
5.3.2切片轮廓数据的构建

5.3.3喷涂路径的生成
喷涂机器人运用4.3.4中的截面轮廓数据处理方式对小曲率曲面截面轮廓数据进行排序处理,并保证相邻切片数据排序方向相反;运用插值算法将相邻截面轮廓连接起来便可求得完整光滑的喷涂轨迹。
喷涂轨迹即切平面与小曲率曲面的交线,通过求交法可以简单求得曲面喷涂轨迹,但是获得的喷涂质量达不到理想的要求,因此必须对轨迹进行优化保证喷涂质量。

喷涂机器人
面向小曲率曲面的喷涂机器人喷涂轨迹规划
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









