





喷涂机器人喷涂轨迹规划中小曲率曲面上的喷涂轨迹优化
时间:2017-08-29
阅读:8932
原创

5.4小曲率曲面上的喷涂轨迹优化
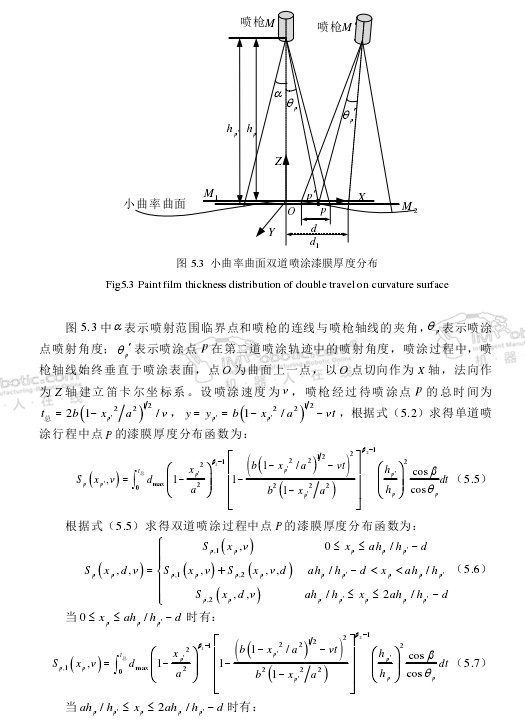
喷涂机器人本章选取的切片方式为平行平面组,并以漆膜厚度均匀性为优化目标对漆膜叠加厚度d和喷涂速度v进行优化。首先,建立双道喷涂过程中喷涂漆膜厚度分布模型,如图5 .3所示。
5.5本章小结
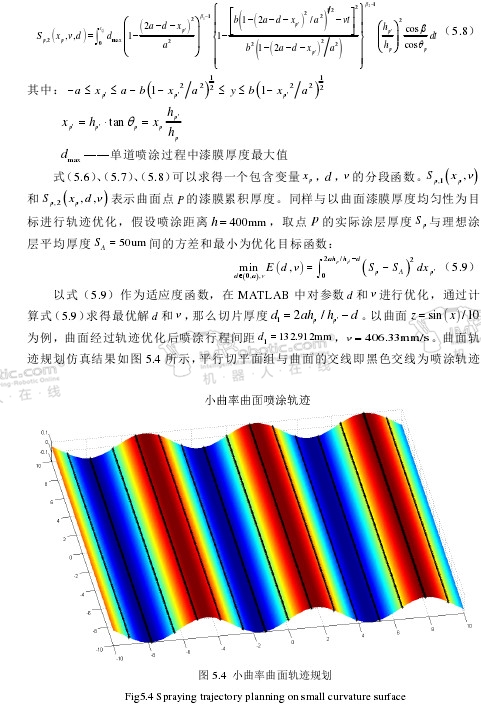
本章以小曲率曲面为研究对象建立了小曲率曲面漆膜厚度分布模型;引用点云切片技术,对小曲率曲面喷涂轨迹规划及优化相关技术开展了研究;采用切片算法对小曲率曲面进行喷涂轨迹规划,提高了轨迹规划的效率;以涂层均匀性为优化目标建立优化模型对喷涂速度、漆膜重叠宽度进行优化,保证了漆膜厚度分布的均匀性。
6汽车油箱喷涂实验
汽车油箱表面带有平面、圆柱面以及小曲率曲面特征,因此本文以汽车油箱为研究对象,采用本文研究的喷涂轨迹规划相关技术进行喷涂实验验证。
6.1油箱点云模型的获取
6.1.1油箱表面点云模型的采集
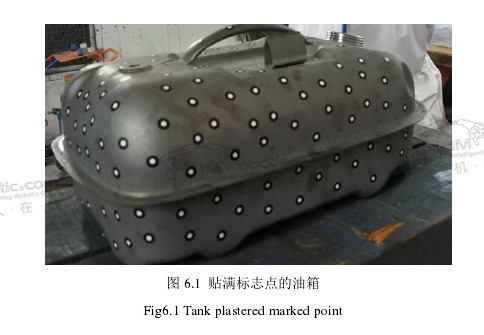
汽车油箱实物如图6.1所示。
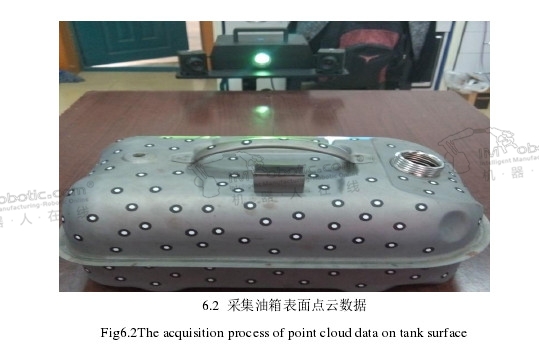
采用第二章提到的PowerScan系列面结构光三维扫描仪采集油箱表面的三维点云模型。扫描过程按以下流程进行:
①在油箱表面特征处贴上标志点,如图6.1所示;
②对三维扫描仪进行系统标定,找出扫描物体表面每个点云的空间几何位置与在图像中对应点之间的相互关系。系统标定的精度直接影响系统扫描精度,从而影响到点云模型的精度,因此在标定过程中必须找准点的对应关系;
③确定油箱点云模型的拼接方式。若单次扫描达不到预期要求,则需要对其进行多次扫描。
汽车油箱表面点云数据采集过程,如图6.2所示。
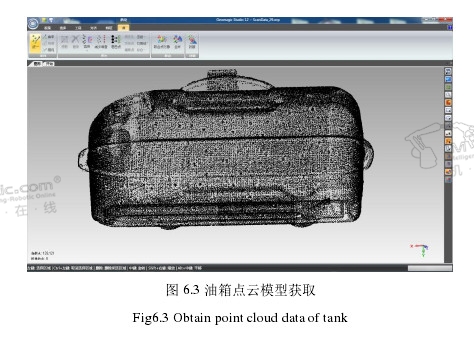
经过多次扫描得到油箱表面多个单片模型,需要将其进行整合拼接。本文采用Geomagic提供的标志点自动拼接功能来完成单片模型的拼接,最终通过三维扫描仪采集得到油箱点云模型如下图6.3所示。
6.1.2油箱表面点云数据降噪及特征识别
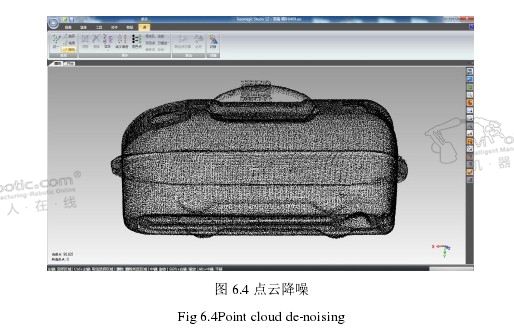
采用第二章提出的基于PCA法向优化降噪方法对油箱表面点云数据进行降噪,降噪后的油箱点云模型如图6.4所示。
得到降噪后的点云后,通过计算点云误差向量幅度的平均方差识别油箱表面特征,如图6.5所示。
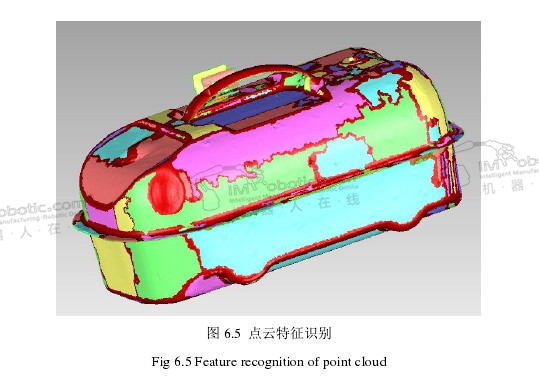
喷涂机器人如图6.5所示,图中浅蓝色、黄色以及部分绿色区域为平面,紫色和部分绿色区域为圆柱面,手柄红色以及红色边缘区域为小曲率曲面。

喷涂机器人
面向小曲率曲面的喷涂机器人喷涂轨迹规划
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









