





油箱表面喷涂轨迹规划
时间:2017-08-29
阅读:7813

6.2油箱表面喷涂轨迹规划
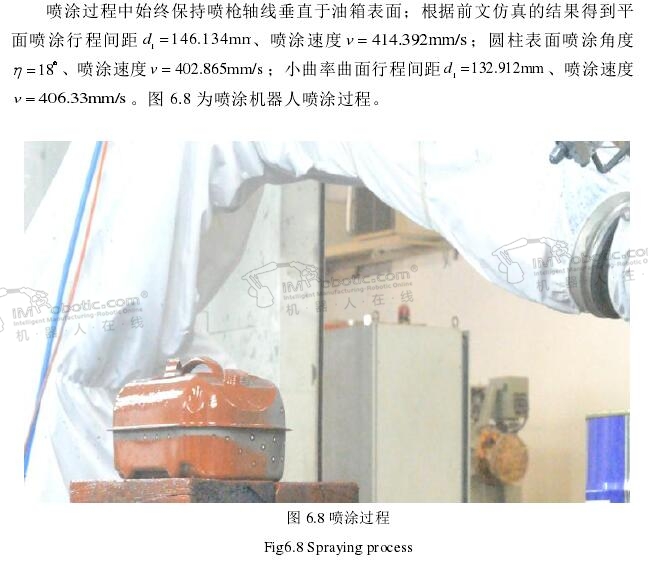
本实验采用课题组自主研发的六自由度喷涂机器人(如图6.6 >结合建立的漆膜厚度分布模型与喷涂轨迹优化结果对油箱进行喷涂实验。

如图6.7所示为油箱喷涂实验现场。

在6.1.2节中对油箱表面点云特征进行了识别,根据识别结果选取本文建立的平面、圆柱面以及小曲率曲面上的漆膜厚度分布模型对喷涂表面进行轨迹规划实验。实验用的油箱长度500mm,宽度240mm,高度200mm。实验步骤如下:
①确定喷涂工艺参数:喷涂距离h = 400mm;喷枪(ZPQ9 )两端空气压力0.3Mpa ;油漆选用干燥时间短的双组份丙烯酸漆工程机械用漆,将油漆粘度调到900Mpas ,保持涂料温度在200 C -- 300 C范围内;喷射涂料流量设置为0.15L}min-' ;
②用酒精清洗油箱表面,保证表面清洁度;
③调试喷涂机器人喷涂程序,准备喷涂;
③在常温2_50 C、相对湿度_50%条件下对油箱进行喷涂实验;
④待漆膜干燥后用涂层测厚仪测量油箱表面漆膜厚度;
喷涂实验后得到油箱不同侧面的喷涂效果,如图6.9所示。

引用随机采样法采集汽车油箱表面20个点的漆膜厚度,如表6.1:
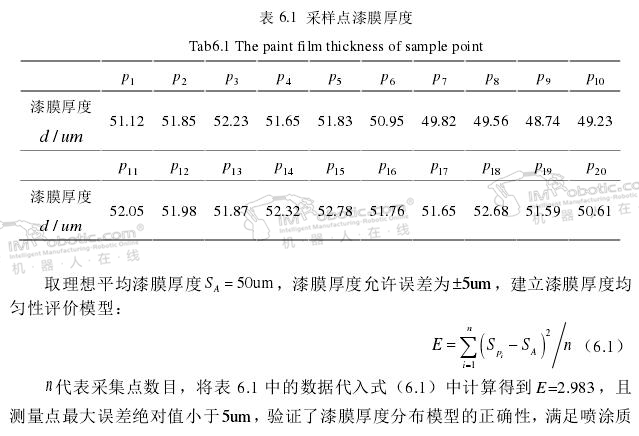
量要求。
从图6.8中可以观察到油箱部分区域有几方面的缺陷,比如转角处有流挂现象,漆膜厚度明显高于其他区域的漆膜厚度;在直角下方漆膜比较薄;在特征表面交界处漆膜厚度分布不均性。分析其原因有以下几点:
①油箱特征表面处是匀速喷涂,导致在转角处漆膜厚度分布均匀度差异较大;
②在喷涂之前油漆粘度、温度、喷雾压力等工艺参数在喷涂过程中由于受到环境影响发生了变化,导致了在某些区域油漆累积量比较多造成流挂现象;
③喷涂实验只进行了单遍喷涂,某些死角处如:直角下方的漆膜累积量比较少导致喷涂质量较差;
④对特征曲面交界处没有进行轨迹优化,这也是以后的研究方向。
6.3本章小结
本章以汽车油箱为喷涂实验对象,结合本文分析的点云模型获取技术、漆膜厚度分布模型以及轨迹规划与优化算法进行喷涂实验;建立了漆膜厚度均匀性评价模型,并采集油箱表面漆膜厚度数据分析漆膜厚度分布的均匀性。实验结果验证了本文建立的漆膜厚度分布模型与喷涂轨迹规划及优化算法,保证了漆膜厚度分布的均匀性,获得了良好的喷涂质量。

喷涂机器人
面向小曲率曲面的喷涂机器人喷涂轨迹规划
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









