





混联机翼喷涂机器人机械结构的研究
时间:2017-08-29
阅读:9399

1.2.1喷涂机器人机械结构的研究
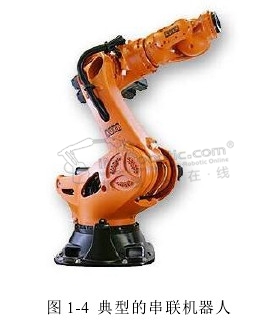
机械结构按照运动方式的不同可以分为串联机构,并联机构以及串并混联式机构。图1-4中的机器人是由各个关节串联在一起构成的,例如末端的手关节就是串联在腕关节上,上级腕关节的转动会带动下级手关节运动,这类机器人被称为串联机器人。串联机器人的主要优点是运行灵活,执行末端覆盖范围大,但由于串联机器人的从底座到末端执行件之间的连接是一级一级串联起来的,电机需要安装在连接的关节上,这样的连接方式既增大了运动惯量,又累积了各个关节的误差,因此在高速运动下会降低精度,甚至带来安全隐患。
正是串联机器人存在的这些无法弥补的缺点,随着应用的推广和深入,这些缺点逐渐暴漏,这时并联机器人逐渐进入研究人员的视线。1978年,Hunt将六自由度Stewart平台应用到了并联机器人中,开创了并联机构在机器人领域应用的先例。并联机构是一种以并联方式驱动的闭环机构,其动平台和静平台之间至少通过两个相互独立的运动链相连接,通常具有两个或两个以上的自由度。并联机构的这些特征决定了它的主要优点是:无累积误差,精度较高;刚度好,负载能力得到提升;完全对称的并联机构具有较好的各向同性。正是由于以上优点,并联机器人被广泛应用于运动模拟器、并联机床,微操作机器人等领域,如图1-5所示的Delta机构是是并联机构的典型代表,在业界取得了广泛的应用。但由于其闭环结构的原因,并联机构存在结构尺寸偏大、工作空间小、末端执行件无法全闭环控制,控制算法比较复杂等缺陷。

由于并联机器人和串联机器人都有比较明显的缺点,所以学者们考虑将这两种机器人的优点结合起来,这就是通常所说的混联机器人。Neumann博士于1988年发明了Tricept机械手模块,如图1-6所示,正式拉开了研究混联机构的序幕,后来Neumann在此基础上又做了一些改进。

国内对于并联机器人的研究开始于上世纪八十年代,从燕山大学黄真教授开始,部分高校和科研机构在并联机器人领域进行了大量的理论和试验样机的研究。天津大学黄田等人在Tricept机构的基础上做了一些改进和创新,通过在其末端上加一个两自由度关节形成TriVariant机构,并对这些机构进行了一系列的研究,后来在此基础上又开发了Tricept-IV和EXE-M等一系列混联喷涂机器人。

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









