





混联机翼喷涂机器人自由曲面上涂料沉积厚度模型

2.3.4自由曲面上涂料沉积厚度模型
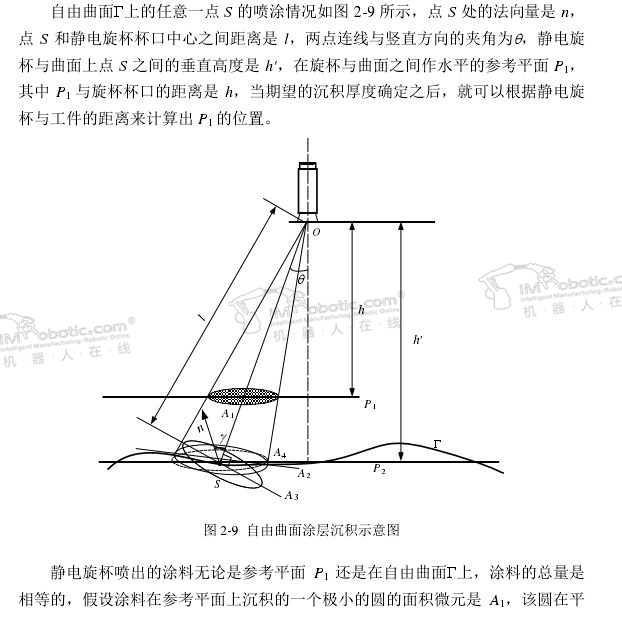
机翼表面是复杂的异形曲面,在某些区域有曲率较大的自由曲面,涂料在上面的沉积和平面上的有些许差别,需要对平面上的涂料沉积模型做出修正。由于喷涂机器人喷涂工艺上要求涂料是均匀流动,静电旋杯始终沿着机翼法线方向,且旋杯与机翼表面垂直高度是固定的,旋杯喷出的涂料都是沉积在喷炬范围内。所以沉积到平面和自由曲面上的涂料体积和密度并没有发生变化,只是沉积的面积和厚度发生了变化,所以可以利用“投影法”将平面涂层沉积模型变换到自由曲面上。
2.4喷涂工艺仿真分析
本节将上文中静电旋杯的几种涂层分布模型,针对喷涂过程中影响涂层质量的工艺参数进行仿真分析,进而确定适合机翼喷涂的各项参数的取值。
在本章第一小节己经确定了静电旋杯的型号,一般情况下旋杯生产厂家会根据自身产品的特点,给用户这些参数的建议值,产品在这些参数下工作时,喷涂效果都有比较理想,一般不建议用户修改这些参数。表2-1列出了PPH308静电旋杯的工艺参数取值。
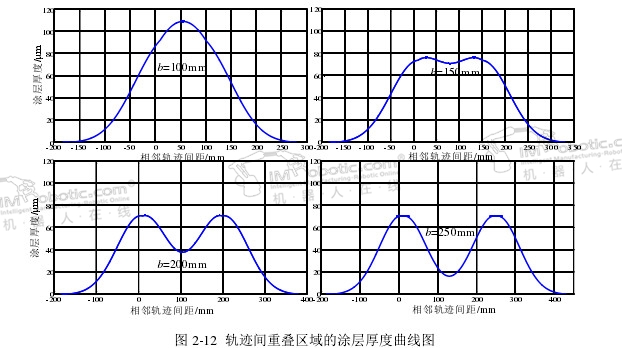
最后需要确定相邻喷涂轨迹间距b,将式(2-14)和式(2-24 )联立起来可以得到两条相邻喷涂轨迹之间的计算公式,然后将确定之后的各项参数代入该式,选取不同的喷涂轨迹间距b值进行涂层沉积厚度模型仿真分析。
图2-12给出了不同轨迹间距下涂层厚度的仿真曲线图,从图中可以看出,当相邻轨迹间的间距b=100mm时,重叠区域的涂层厚度超过100μm;当b=200mm或250mm时,重叠区域的涂层厚度过薄,与周围区域差异较大;当b=150mm时,重叠区域的涂料沉积厚度和周围的厚度是最接近的,所以最终确定相邻的两条喷涂轨迹间的距离为150mm。
2.5本章小结
本章从旋杯式静电喷涂的工作原理入手,建立了喷涂沉积厚度模型,先后分析了平面上定点喷涂沉积厚度模型,运动时旋杯喷涂沉积厚度模型,以及自由曲面上的喷涂模型。最后结合各个模型对实际喷涂时的工艺参数与涂层沉积厚度之间的关系进行了仿真分析,最终确定了重要的喷涂参数,这些参数是喷涂轨迹规划必要的条件,也是喷涂机器人运动控制的基础。


好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









