





混联机翼喷涂机器人的轨迹规划

第三章混联机翼喷涂机器人轨迹规划
机器人运动轨迹是指机器人末端执行机构在运动过程中随着时间的变化,其位置、速度和加速度的集成。喷涂轨迹规划就是按照喷涂工件的形状,结合机器人的实际结构,预先计算出机器人执行任务时的运动轨迹。为了使喷涂机器人按照预定的轨迹执行相应的动作,需要对喷涂机器人进行编程,这就相当于是“告诉”机器人具体怎么工作,所以编程方式、编程效率和质量直接决定了生产过程中机器人的效率和质量。降低跟机器人“沟通”的难度,提高“沟通”效率,从而提高生产效率,这是机器人编程技术发展的最终目的。机器人通常具有很强的灵活性,工作起来柔性好,而能够充分让机器人发挥这些特点的关键途径就是通过编程来确定最佳的工作方式。
3.1机器人编程技术简介
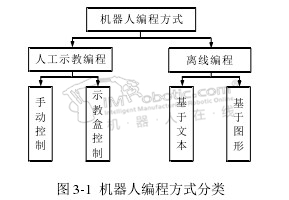
通常针对喷涂机器人喷涂轨迹的编程方式有两种,在线编程(On-lineProgramming)和离线编程(Off-line Programming)。在线编程也叫人工示教编程,“在线”是指编程的时候机器人处于在线工作状态。根据运动控制方式的不同,可以将人工示教编程分为示教盒控制和工人手动控制两类。离线编程也分为两类:基于文本的离线编程和基于图形的离线编程,如图3-1所示。下面将对这两种编程方式进行分析。
3.1.1人工示教编程
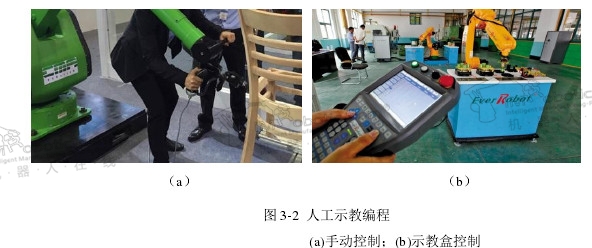
人工示教编程时,需要人工手动或者操纵专用示教盒来控制喷涂机器人到达指定的姿态和位置,同时记录机器人位姿信息并编写机器人运动控制指令,完成机器人在生产过程中的轨迹规划、位置等关节数据信息的采集、记录,如图3-2所示。这种编程方式是针对喷涂机器人作业的不同工件,在真正喷涂之前进行的一次预演。在所有的示教点都示教完毕后,生成完整的程序,检查程序无误后,开始正式喷涂,通过示教再现的方式,令机器人重复示教时的轨迹。这种编程方式下,机器人各个关节的位置是自动测量得到的,操作人员不用关心机器人运动学逆解,只需通过计算机记录下来相应的数据即可。
人工示教编程针对简单轨迹路径、精度低以及加工对象有固定的边界轮廓时,具有高效、可靠、成本低等优点,但是也存在十分明显的缺点
(1)喷涂轨迹是通过工人的经验和大量实验获得的,由于涂层厚度均匀性、喷涂时间与工件表面形状以及工艺参数等诸多因素有关,因此这种编程方式机器人的喷涂效果顶多只是人工水平,而且对于机翼这种由大量复杂曲面组成的喷涂工件,人工示教编程往往很难取得良好的喷涂效果。
(2)作业不够灵活,没有充分利用机器人的柔性和智能性。喷涂的任务一旦发生微小的改变,也需要重新示教编程,难以适应现代化生产的要求。
(3)在示教的过程中,喷涂机器人不能继续工作,降低了生产效率,而且工作人员是处在有害的工作环境当中进行示教编程的,这会给工作人员的身体健康带来很大的损害。


好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









