





混联机翼喷涂机器人基于CATIA数控加工模块喷涂轨迹生成

3.2.2基于CATIA数控加工模块喷涂机器人喷涂轨迹生成
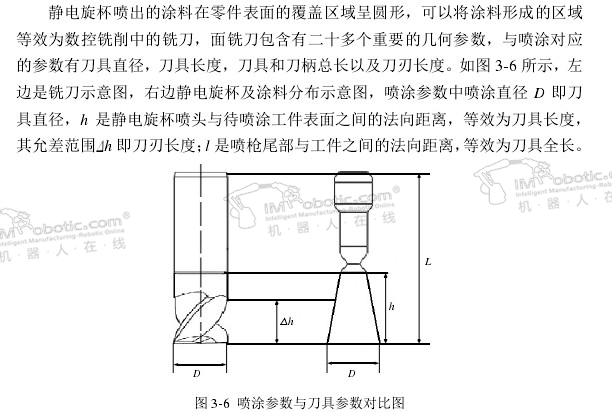
在第二章详细分析了静电喷涂沉积厚度模型以及喷涂工艺参数,下面需要研究与喷涂参数相对应的面铣刀参数,以此来做对比与分析。
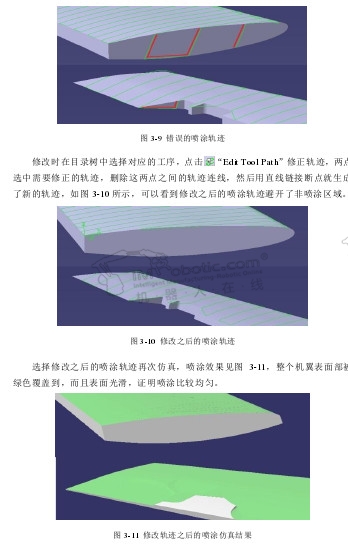
由于在飞机装配时,翼根处是机翼与飞机机身固定的部位,而翼尖处需要安装襟翼等其他部件,所以这些地方都不需要喷涂。仔细观察喷涂轨迹,可以看出喷涂轨迹覆盖了机翼的这几个部位,如图3-9所示,这几个部位的刀具轨迹用红线标示出来,刀具轨迹示意图可以看出,所以需要对轨迹进行相应的修正。将错误喷涂轨迹用红线标示。

3.3基于工件STL模型的喷涂机器人喷涂轨迹规划
基于CATIA数控加工模块制定的机翼喷涂轨迹效果良好,然而这种轨迹规划方式也存在不足之处。在航空制造领域,制造商考虑到保密和专利等因素,其提供的模型往往是类似于STL, CGR这种点云数据的文件,这种类型的文件处理起来比较繁琐,加工之前需要利用CAD/CAM逆向工程中的一些方法,比如拼接、缝合、补洞等对待喷涂工件进行预先处理。为了解决这个问题,本节将主要针对STL文件的轨迹规划方法展开研究。
3.3.1 STL文件简介
STL文件是逆向工程中快速原型制造技术服务的三维图形文件格式,是美国3D SYSTEMS公司于1988年制定,目前己经被公认为是系统与快速成型系统之间数据交换格式的一种标准数据格式,甚至在微软发布的最新计算机操作系统Win 10里面,默认支持STL文件预览,并且允许用户进行简单的操纵。
STL文件是通过三角形网格单元(即类似于有限元分析中网格划分的三角面片)来拟合逼近三维实体模型的表面轮廓特征的,逼近的精度取决于三角形面片的数目。如图3-13所示,从图中可以很明显看出,机翼曲率越大的部位,三角形面片越小越密集。当三维模型的曲面越不规则或者给定的逼近误差越小时,所需的三角形面片越多,STL文件所占空间就越大。

STL文件根据存储方式的不同可以分为两种格式,一种是二进制格式,另一种是ASCN码格式。ASCN码格式的STL文件可以通过文本方式打开,主要描述了文件中每个三角形顶点的坐标信息,同时和这些顶点坐标匹配的有该三角形面片的外法向量。STL文件作为一种高效稳定的三维模型描述文件,遵从以下几个规则:
(1)共顶点规则:每个三角形面片必须与相邻的三角形面片共用顶点,也就是说某一个三角形面片的顶点不会落到其余三角形面片的边上。
(2)取向规则:用三角形顶点的排序来确定内外表面,反时针排序表示外表面,顺时针排序则表示内表面。
(3)取值原则:每一个三角形面片的顶点坐标值必须是正数。
掌握了STL文件的重要特点之后,下面根据这些特点来研究轨迹规划算法。


好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









