





一种混联机翼喷涂机器人轨迹规划与控制系统开发的关键算法研究

3.3.2关键算法研究
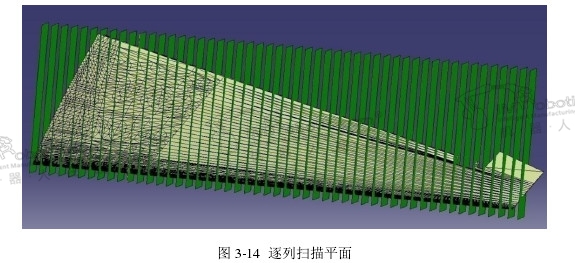
机翼形状较规则,近似呈梯形状,最有效的机翼喷涂机器人喷涂方式是逐行或逐列按照“之”字形喷涂。所以轨迹规划采用STL模型切片算法,其基本思想是利用一系列互相平行的切片平面与STL模型的求交运算,如图3-14所示,相交的部分就是机翼表面的喷涂轨迹,将此轨迹沿着静电旋杯方向矢量偏置到最佳高度就得到静电旋杯运动轨迹。
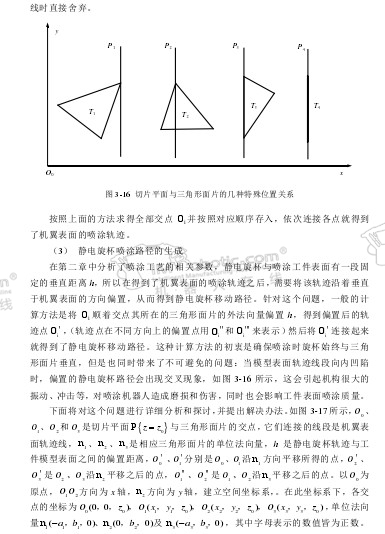
由于零件STL模型不是一个整体,而是由大量三角形面片组成,所以切片算法的难点在于求切平面与零件模型的交线。本文采取的算法如下:首先给定切片平面方向(即单条喷涂轨迹方向),然后结合用户指定喷涂参数计算切片的数量和每一层切片平面的坐标值,接着比较切平面与三角形面片顶点在指定方向上坐标值的大小关系,然后把与该平面有交点的三角形面片全部列出来,将三角形面片的边线与平面的交点记录下来,接着把这些交点连接起来就是一条机翼表面的喷涂轨迹。将得到的机翼表面喷涂轨迹按照各段的姿态向量偏置一段距离就得到了静电旋杯移动轨迹,此处的姿态向量就是各个三角形面片的外法线方向。
(1)切片平面的生成
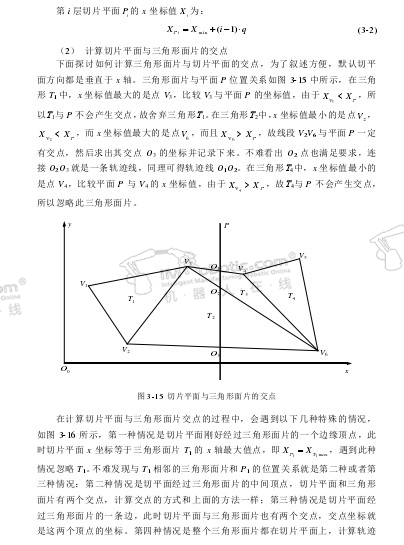
在计算过程中,切片平面的数量各层坐标是基本参数也是关键参数。本文采取的计算方法如下:首先确定切片方向,然后沿着切片方搜索STL模型的最大最小坐标值,求出模型在切该方向上长度,结合用户给出的切片厚度来计算出切片的数量及各层的坐标。比如工件STL模型在x方向上坐标最大和最小的点分别是

3.3.3轨迹规划软件开发
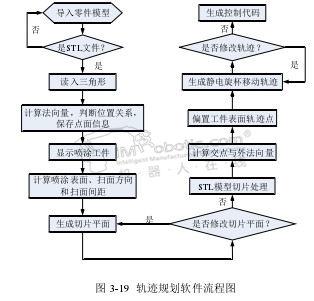
轨迹规划软件开发在Microsoft Visual Studio 2010软件下进行,以C++为开发语言,利用MFC多文档模板,设计了软件整体框架。OpenGL是一种图形与硬件的接口,包含超过700多个函数,用来创建交互式的三维图形应用程序,经过多年的发展,至今己经是图形处理业内标准,所以本文采用了OpenGLCOpen GraphicsLibrary)图形库创建图形环境,完成了三维模型的绘制、几何变换等操作。图3-19是轨迹规划软件流程图。
轨迹规划软件的操作界面包括文件、编辑、视图和帮助四个主菜单,工具栏则包含了参数设置、移动、旋转、显示比例、观察视角、显示模式等操作。软件可以实现的功能包括以下几个方面:
(1)读取并显示用户给定的喷涂工件STL模型,允许用户对模型进行放大缩小、切换观察视角等功能。
(2)切片平面的计算、生成和显示,可以根据用户实际需要在不用方向上生成不同间距的切片平面,在检查轨迹时如果工件模型和切片平面内影响视线,用户可以选择不让其显示在窗口中。
(3)允许用户设定喷涂工艺参数,根据这些设定的参数,生成空间喷涂轨迹,允许用户以增加或删除轨迹段的方式来对喷涂轨迹进行修改,解决了实际喷涂过程中人为干预的问题,提高了软件的通用性和灵活性。
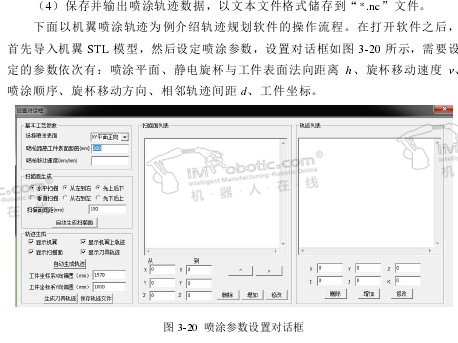
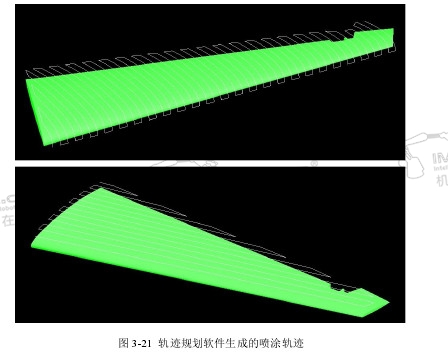
全部参数设定完毕之后生成切平面,用户可以检查有没有需要修改的地方,修改完毕点击生成喷涂轨迹,本例中选择机翼上表面为喷涂面,h = 200mm ,v = 0.4m/s , d =150mm,坐标系原点为机翼前缘线翼根处,如图3-21所示,生成的翼根到翼梢竖向和横向喷涂轨迹,可以看出喷涂机器人喷涂轨迹光滑、连续、均匀,覆盖到了整个机翼表面,然后输出保存轨迹即可。


好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06









