





一种混联机翼喷涂机器人轨迹规划与控制系统开发的运动控制器(下)
时间:2017-08-31
阅读:7289

一种混联机翼喷涂机器人轨迹规划与控制系统开发的运动控制器(下)
4、ACC一11E
这是24位数字I/O接口板,负责数字量的输入与输出,如图_5-2所示。该接口板包含了输入和输出个24位,共计48路通道。UMAC在内部设置了寄存器地址与每个通道相对应,而且每一路通道都有光电隔离和滤波处理。

5、ACC-_5 1E
这是绝对式编码器反馈模块卡。前面提到了ACC-24E2为用户提供了增量式编码器的反馈接口,但是增量式编码器无法在断电之后继续保存位置信息。在喷涂机器人运行时如果忽然断电,要求系统能够完全记录断电前各轴电机的位置状态,以便通电时能够完全恢复原来的工作现场,所以本文为电机配备了绝对式编码器,这就要求配备专门的绝对式编码器反馈接口卡。每个ACC-_51 E板卡可以提供两路绝对编码器反馈通道,所以跟运动控制轴卡ACC-24E2一样,也需要扩展,形成“4+2”的工作模式,扩展之后的板卡是ACC-_S lE+Optl+opt2和ACC-_51 E+Optl2其中ACC-_S lE+Optl+Opt2有4个数据通道,而ACC-_S1E +Optl有2个通道,共实现6个通道的编码器数据反馈。
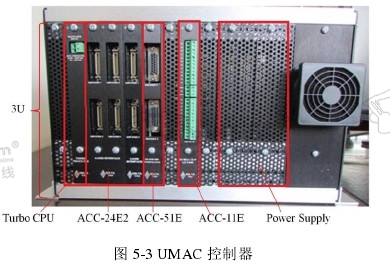
以上就是选配的UMAC所有模块卡,全部组装在3U箱体ACC-R2中,实物如图_5-3所示。

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









