





混联机翼喷涂机器人的伺服驱动器
时间:2017-09-01
阅读:10299

混联机翼喷涂机器人的伺服驱动器
伺服驱动器连接在运动控制器和伺服电机之间,通过接受运动控制器发送控制信号,将控制信号放大之后来直接驱动伺服电机按照运动指令运行,其最根本的功能是是放大控制信号,驱动电机运转。目前大多数驱动器控制核心都是基于DSP技术的,随着DSP技术的发展,伺服驱动器的功能越来越完善,可以实现更加复杂的控制算法,而且驱动器也开始往更加智能化和网络化的方向发展。运动伺服控制大多采用“电流环一速度环一位置环”的“三环”控制系统,从内到外依次是电流环、速度环、位置环,这三个反馈回路构成了一个完成的伺服控制系统,如图_5-4所示。
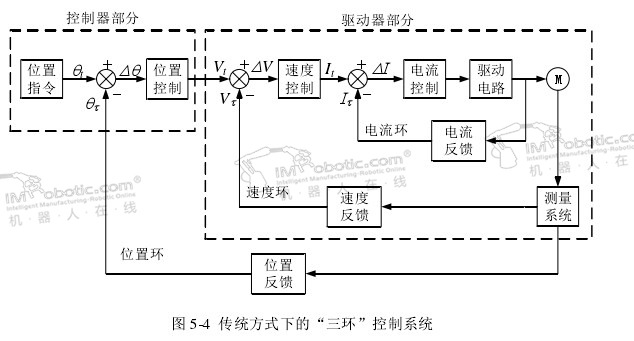
在这三个反馈回路中,电流环的控制是通过控制电机每相的相电流来完成的,其控制频率最高,速度环和位置环的控制都是基于测量元件反馈的数据进行的,比如编码器、光栅尺等。当运动控制器中闭合的控制回路越多,运动控制器对电机的伺服控制能力就越强,电机对于控制器指令的响应也就越快。然而图_5-4的这种传统控制模式下,电流环和速度环是在闭合在驱动器里的,而位置环的控制则通过控制器来实现。这种控制模式一方面会导致UMAC对电机的控制权重不高,UMAC强大的控制性能无法完全发挥,伺服系统动态响应性能不够高效,还会带来时钟同步、延迟、噪声免疫性等问题。另一方面在进行伺服控制参数调试时,首先需要调试驱动器中的电流环和速度环的控制参数,然后再通过驱动器来调试位置参数。这种模式下的控制参数调试过程非常繁琐,往往需要在驱动器和控制器上来回调试多次。
正是出于以上因素的考虑,本文采用以色列Servotronix公司定向开发的专门用于连接可生成PWM信号的伺服放大器CDHD PWM Power Block CPPB)系列产品来替代传统控制方式中的驱动器。在这种控制体系下,伺服放大器直接将来自控制器的运动信号放大来驱动伺服电机,这样系统的位置环、速度环、电流环全部由UMAC控制,即图_5-4中的三个反馈回路全部闭合在UMAC控制器中。这种高度集中的控制方式的好处就是极大地简化了参数调试的工作,解决了传统控制方式存在的时钟同步、延迟、噪声免疫性等问题,将整套控制方案的优势充分体现出来。根据放大功率的不同,选择了CDHD-024和CDHD-006两种型号,如图_5-_5所示,其中后三位数字代表了输出电流的大小。

CDHD PPB系列放大器一共有五种规格,其中6A与24A规格提供了1:3的连续电流与峰值电流比,其它规格可提供1:2的连续电流与峰值电流比。智能接口卡整合了多种保护机制,其中包括电流过载保护,驱动器过热指示和过压欠压保护,七段显示器故障显示等。喷涂机器人

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









