





混联机翼喷涂机器人防撞系统
时间:2017-09-04
阅读:8077

防撞系统
在机翼喷涂过程中,为了喷涂机器人和机翼、工装夹具等发生碰撞,主要采取以下保证措施:
(1)在硬件方面,每个驱动均装有正向、反向位置限位保护传感器和相应的保护电路,以及快速切断电源的急停保护按钮。
(2)在软件方面,系统实时监控各轴运动位置,UMAC控制系统中设有软限位,上位机发送控制指令时,也会判断是否在允许范围内。
(3)轨迹规划和后置处理生成的控制代码,在用于实物喷涂作业之前,要先经过仿真检验有无碰撞发生。
(4)在喷涂系统作业过程中,系统状态监控软件实时获取各轴运动位置情况,根据各轴实时运动位置,获取末端执行器实时的位置和姿态信息,以判断末端执行器是否与其他部件和工件发生干涉碰撞。
(5)在喷涂系统作业过程中,控制系统会实时监控各轴跟踪误差,当跟踪误差超过一定数值时,控制系统报警,甚至停机,避免系统运动偏离预定轨迹。
5.3基于UMAC系统软件设计
5.3.1运动控制软件
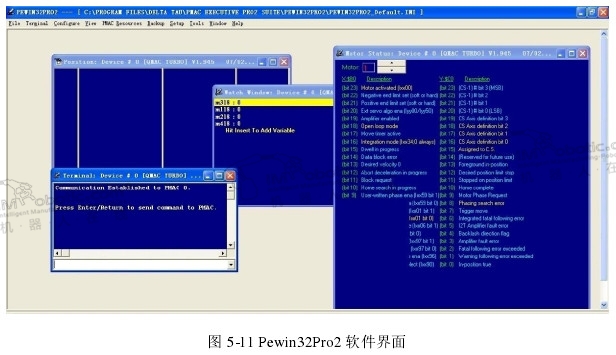
UMAC为用户提供了Windows系统下的执行软件Pewin32Pro2,运动控制软件运行于UMAC控制器上,使用时通过Pewin32Pro2来调用,软件操作界面如图_5-11所示,Pewin32Pro2能够实现很多功能,比如:控制命令的发送,坐标系和电机实时状态的显示、手动运行等功能。运动控制软件的主要功能是建立与硬件底层接口,对电气系统进行直接控制。完成UMAC控制器坐标轴系、电机的定义、对相应参数进行补偿,同时喷涂系统状态和各轴数据采集、PLC逻辑控制、机器人运动学解算、轨迹规划软件生成的喷涂控制指令也在运动控制软件中实现。
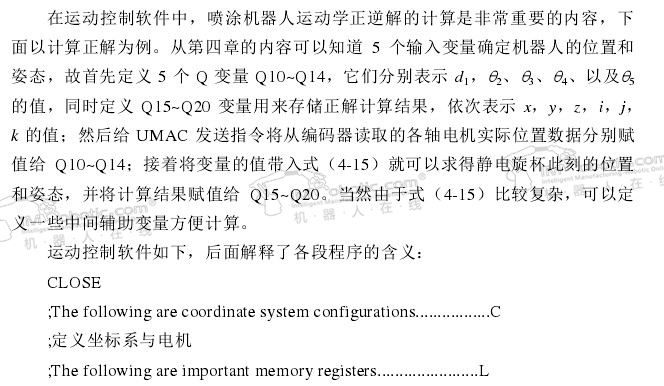
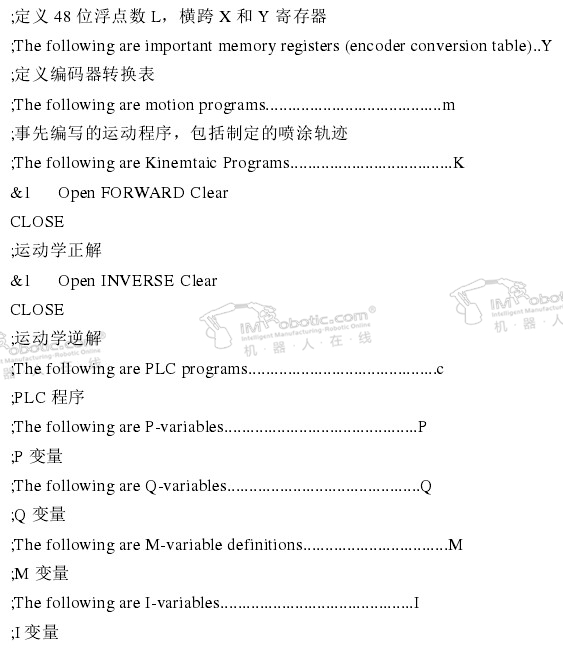
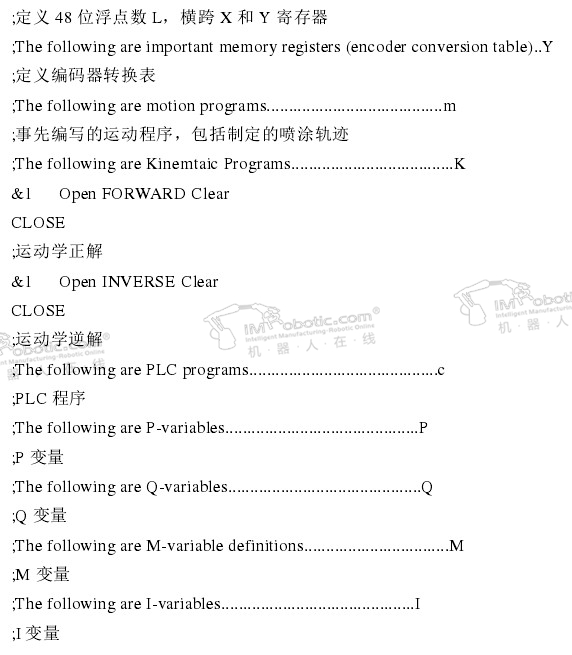
运动控制软件的设计需要依赖于UMAC提供的变量,UMAC内部有I, P, Q,M四种变量。其中I变量主要是系统自定义变量,需要先行设置并存储,在UMAC启动之后初始化各个坐标系、电机参数以及编码器地址等,不允许用户随意更改;P变量是全局用户变量,所有的坐标系都能使用,在内存中有固定的位置,从PO到P1023共有1024个变量,用户在编写PLC程序和运动程序时可以调用;Q变量跟P变量唯一的不同是它属于局部用户变量,不同坐标系下的Q变量是不同的;M变量则用于UMAC内存和I/O地址指针的存储,M变量的使用较为灵活,可以表示字符、半字节、字、双字等,可以通过提供字的地址来定义M变量。喷涂机器人

喷涂机器人
一种混联机翼喷涂机器人轨迹规划与控制系统开发
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-12 16:28:55
- 2023-05-12 21:00:04
- 2023-05-15 12:01:26
- 2023-01-09 10:31:58
- 2018-11-13 10:35:38
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









