





基于PSO算法的焊接机器人机器视觉在焊接中的应用(下)
时间:2017-09-06
阅读:10251

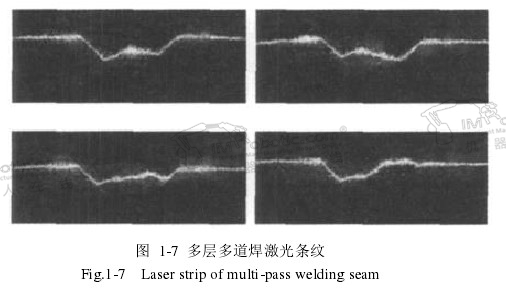
主动视觉一般是利用激光能量高,单一性好的特点,进行焊缝的识别焊与跟踪。文献设计了一套基于激光视觉传感系统,通过辅助激光条纹提取多层多道焊接机器人焊接过程中每个焊道特征拐点。如图1-7所示,a,b,c,d分别是3~6道焊道的激光条纹。为后续的焊缝跟踪,焊道规划策略提供了参考。
王黎明等针对钢管焊缝特点,利用V字形结构光焊缝中心的识别方法。文中将采集后的图像经过二值化、平滑滤波及图像形态学的处理过程,成功识别了焊缝中心位置。Kim T等设计了一套基于激光的焊缝跟踪视觉系统,该系同能够自动采集带激光条纹的图像,并识别、提取焊缝信息,实现机器人人自主跟踪。
基于主动视觉的机器人焊接传感器,目前己经有成熟的产品。这些生产厂家都是国外知名的公司,如M eta公司、Servo-robot公司。图1-8是Meta公司最新研制的一款用于弧焊的激光传感器,该设备能够应用于各类复杂焊接的焊缝跟踪,可装配于多种机器人。
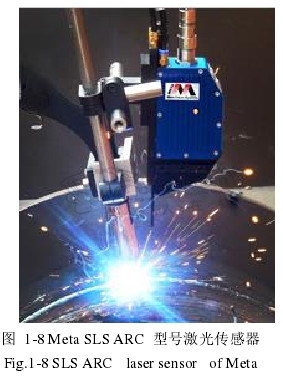
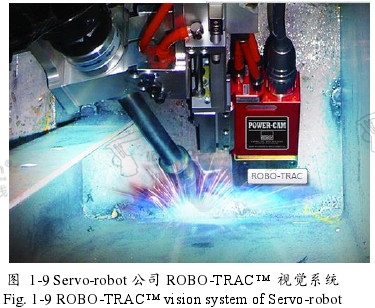
图1-9是Servo-robot公司的一款基于激光的视觉系统产品,该设备集成了缝识别和跟踪功能,能有效提高焊接质量和效率,且可装配的机器人种类广泛。
被动视觉由于直接利用自然光或者弧光作为照明源,多获得的图像内容丰富。在焊缝识别、跟踪和熔池检测方面的研究也很多。
文献直接采用弧光作为光源,在平铺分析的基础上,选取合适的滤光片,利用复合滤光技术得到了清晰的熔池图像,如图1-10所示

文献基于被动视觉,对C02焊接熔池图像采集与处理进行了研究。通过复合滤光系统消除了弧光干扰,进过图像处理后可以清晰的观测到熔池形状。
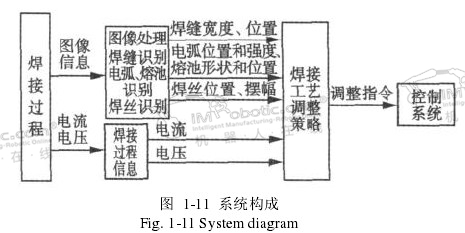
郑军、潘际蛮为避免焊接过程夹渣、未熔透等缺陷,研制了基于被动视觉传感的焊接过程多信息检测系统,其系统构成如图1-11所示。文章选用950mm左右波段的复合滤光系统,可以获取清晰的焊接图像。该系统视觉可同时对焊缝、电弧、熔池和焊丝等进行实时检测,有效保证了焊接机器人焊接成形质量。

焊接机器人,基于PSO算法的焊接机器人视觉系统标定与初始焊位导引
技术干货

好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









