





基于PSO算法的焊接机器人视觉系统标定与初始焊位导引摄像机成像模型

基于PSO算法的焊接机器人视觉系统标定与初始焊位导引摄像机成像模型
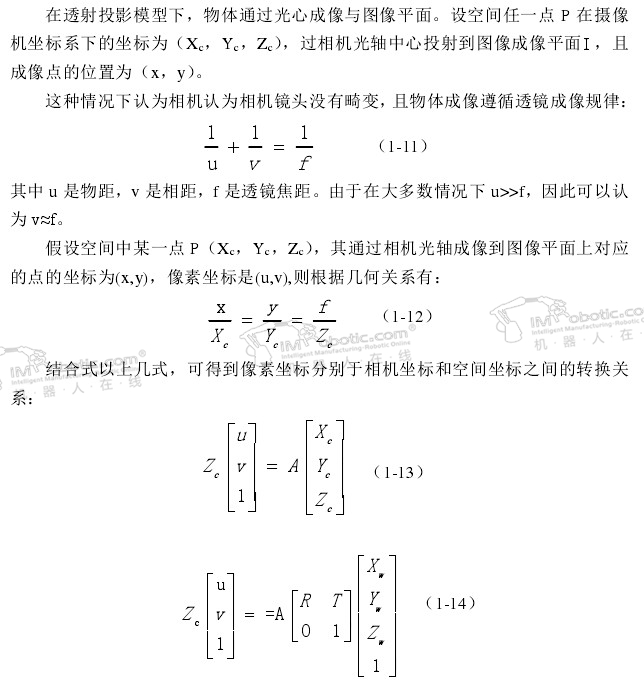
1.4.4摄像机成像模型
相机成像变换过程中涉及到四个坐标系的转换,即三维世界坐标系(WorldCoordinate System、三维相机机坐标系(Camera Coordinate System、二维图像平面坐标系(Image Coordinate System)和二维像素坐标(Pixel Coordinate System )来描述相机成像过程。
(1) 三维世界坐标系,用来表示物体所在的实际空间。
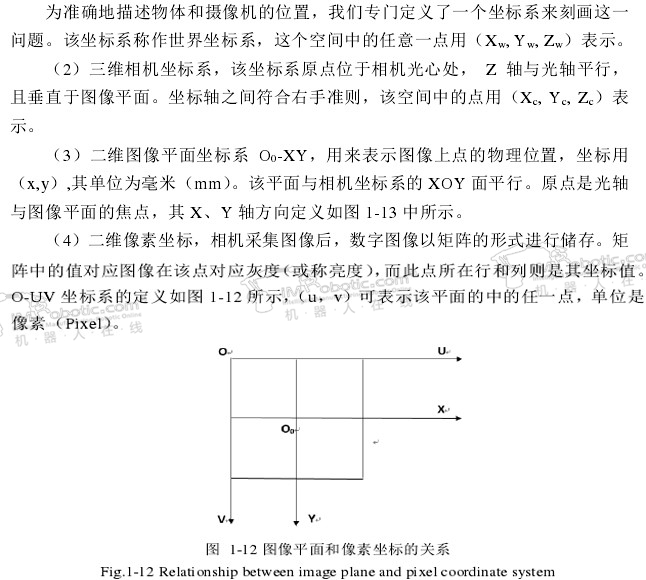
根据上图,我们可以建立图像中各点的像素坐标和图像平面坐标之间的关系,表示如下:
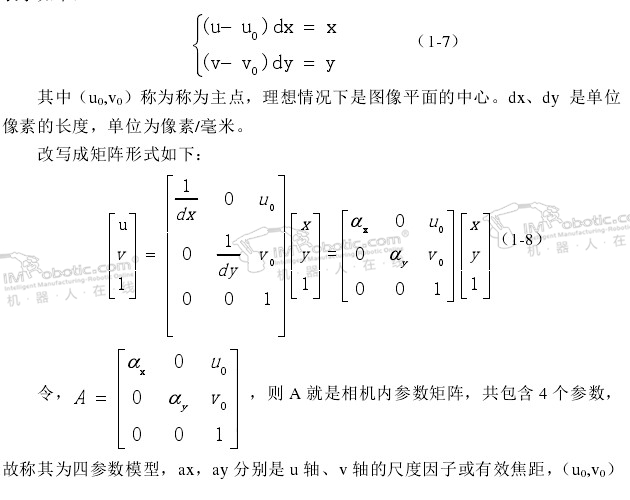
称为主点
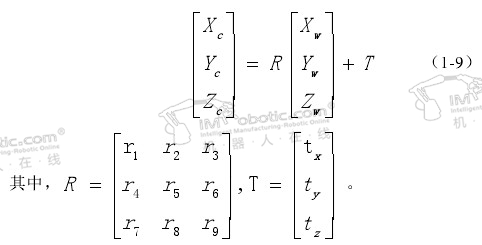
此外,对于相机坐标系和世界坐标系之间的关系,通常用旋转矩阵R和平移
向量T来描述,其数学表达式如下:
因此,可以把摄像机的标定理解成是一个确定上述几个坐标系之间的转换关系的过程。
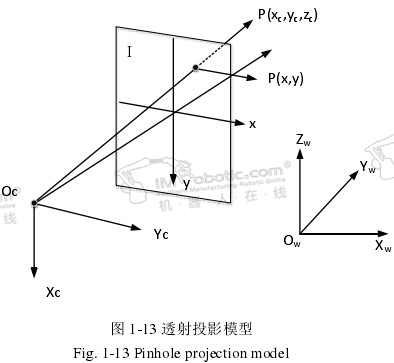
相机模型是摄像机标定的成像几何基础,主要分透射投影模型(针孔相机模型)和非线性(畸变模型)这两类。
(a)透射投影模型
相机模型是用来描述三维空间中任一点与图像上对应像素点之间的转换关系,如图1一13所示。
1.5粒子群算法及其研究现状
粒子群算法最先由Kennedy和Russ Eberhart于199_5年提出,其主要思想是:通过模拟鸟类觅食的过程来实现寻优求解的目的。和蚁群算法、鱼群算法相似,都是基于群智能搜索的算法。该算法最早起源于学者对自然界中鸟类觅食行为的大量研究。研究发现:以距离食物最近的鸟引导整个鸟群找到食物位置,是最佳策略。由于PSO算法简单、易于实现且搜索效率较高,尤其适用于多维度的全局最优解的搜索问题。
1.5.1算法基本模型
在基本PSO算法中,其参数包括粒子个数、粒子飞行的速度和方向、种群中全局最优解Gbest、个体当前最优值Pbest。在粒子飞行的过程中,用某一标准(适应度函数)来衡量粒子所代表接的优劣程度,并使用Gbest, Pbest来引导整个种群中的粒子进行迭代更新,向着全局最优的方向进行移动。
对于一个搜索空间为D维,粒子种群的数量为n的优化问题,PSO算法的基本模型包含以下元素:粒子速和位置、个体历史最优值、全局最优值。
其具体定义及表达方式如下:
适应度函数f,与优化问题相关的方程。该函数用于评价粒子的优劣程度,为粒子在解空间中的运动提供参考。
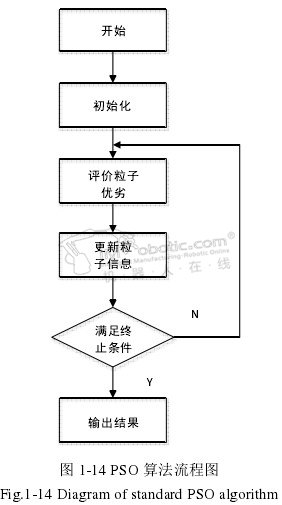
图1-14是PSO算法的运行流程:
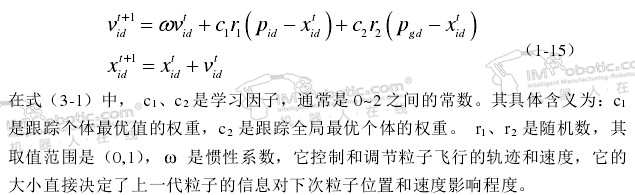
在每次迭代过程中,种群中的粒子根据下式更新自身的位置和速度。焊接机器人


好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









