





PSO算法的焊接机器人常见的改进方法(下)
时间:2017-09-07
阅读:7151

PSO算法的焊接机器人常见的改进方法(下)
粒子种群拓扑结构改善。仔细分析PSO算法模型可以发现,在优化过程中粒子之间存这信息交流(位置、速度),表明该算法的性能很大程度上取决于粒子间的信息交流。因此建立良好的信息共享机制,理论上可改善PSO的搜索能力。对标准PSO算法而言,通常只包含一个种群、全局和局部两个搜索层次。第一层次: 以某一粒子为中心的领域空间。对于这个层次粒子依据自身历史最优值为导向进行搜索,不断向全局最优值的方向移动。第二层次:整个粒子种群,在这个高级的层次中,所有粒子以全局最优粒子作为参考,更新自身信息,从而使得整个种群往最优值靠近。这种模型,两个搜索层次之间缺乏信息交流,因而在一定程度上限制了PSO算法的性能。
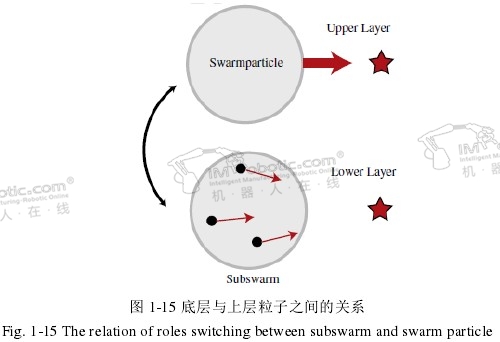
针对这一问题文献提出了多层次的粒子群算法(MLPSO )。如图1-1_5所示,在这种改善后的算法中,把底层的局部搜索看作是上层部分中的一个粒子,同时底层的局部寻优中历史最优值会作为上层中某个粒子的个体历史最优值,这样就实现两个层次间的信息交流。上层是注重于全局的搜索,会综合考虑两个层次中粒子的运动状态。实验表明,通过增加PSO种群搜索层次,可有效改善算法收敛的精度和速度,并在16组比较典型的分支方程的求解中得到验证。王维博等提出了另一种分层次多子群粒子群的PSO算法,并引入混沌搜索操作,有效地实现了粒子之间的信息共享和粒子的多样性,对4个典型测试函数进行仿真后表明,该算法收敛性和精度良好。
与其他智能算法结合。针对PSO算法的易早熟和局部收敛的缺点,许多学者尝试这融合其他算法的优点,通过算法组合的方式提高其性能。文献在PSO算法中加入扰动因子。当搜索陷入局部最优或者粒子早熟时,通过外加扰动的方式,帮助种群最优粒子跳出局部最优,并保持粒子的多样性,避免可能存在最优值被遗漏。江祥奎等考虑到遗传算法中自带的交叉、变异操作和粒子群算法简单、全局搜索能力强的优点,将两者进行组合,提出了粒子群遗传算法,并运用到摄像机标定中。
总之目前为止PSO算法理论仍在不断完善之中。学者对其理论研究和性能改善的方法也层出不穷。主要集中于在PSO算法中加入各种扰动、完善拓扑结构、多智能算法组合,通过这种方法提高其抗早熟和跳出局部最优的能力。焊接机器人

焊接机器人,基于PSO算法的焊接机器人视觉系统标定与初始焊位导引
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









