





光幕喷涂机器人之系统设计与研究系统总体设计
时间:2017-09-13
阅读:7402

2. 3系统总体设计
根据系统需求分析,对喷涂机器人进行模块化设计。喷涂机器人总体框架主要由外形检测系统、嵌入式系统、五轴控制系统、伺服驱动系统、传感器检测系统以及五轴机电系统组成。
其具体系统结构框架如图2.2所示,
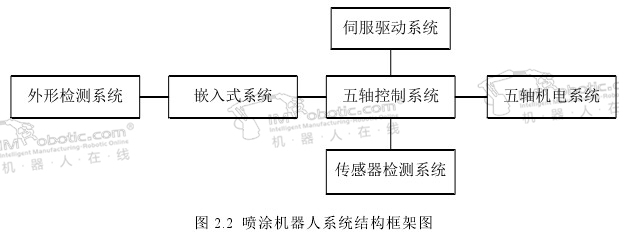
喷漆机器人的工作流程设计大致为:光幕控制系统作为外形检测的传感器,其主要由多对光电对射开关作输入,进行处理后获取遮挡情况。在生产过程中,喷涂对象按照一定速度向前运行。其经过外形检测系统,该系统基于光幕控制系统作为依据,获取喷涂对象的外形数据后,嵌入式系统对数据处理分析,得到有关喷涂对象外形的所有相关信息并形成外形文件,将其下传至路径规划模块进行此次喷涂的路径规划。而后在五轴控制系统中将其转化为对喷涂机器人的控制方式,其间包括控制形式、控制算法、控制语言等。最后,控制系统在传感器检测系统的辅助下,对控制语言进行喷涂机器人的驱动,驱动机电系统在控制器的至
零下按照预定方式运行,使喷枪到达规划的空间位置并进行喷漆作业。
故在喷涂机器人系统设计过程中,主要进行以下方面的设计:
(1)外形检测系统设计:获取防盗门外形数据,检测防盗门的形状与运动速度,实现平面检测。主要研究外形与速度的检测方法,数据文件的处理表达方式。要求检测方法简单可靠,成本低,易于安装。
(2)嵌入式系统设计:构成防盗门外形检测基础装置以及将外形信息数据上传于核心控制器中。主要为设计基于光电采样的图像识别与处理系统的控制电路,对采集的信号进行相对应的识别处理,输出数据信号供喷涂机器人进行轨迹的规划。
(3)五轴控制系统设计:通过控制器结合相应控制算法对五轴喷涂机器人进行控制。主要为在控制成本前提下的控制结构设计,对于核心控制器在多轴联动控制下的测试以及改进控制算法与形式。
(4)伺服驱动系统设计:在控制语言形成并接收后进行喷涂机器人的驱动运行。主要为驱动模式的设计以及驱动电机的选型,选择能满足机电系统、控制系统以及整个喷涂机器人系统需求的驱动模式选择。
(5)传感器检测系统设计:获取机器人运动状态及控制信息。主要为对喷涂机器人喷涂过程中原点、极限等指定点进行检测设计,使喷涂机器人控制过程中获取足够控制信息。
(6)五轴机电系统设计:完成喷涂机器人对于喷枪的空间配置。主要为能满足防盗门或门框的多平面喷涂的五自由度机电设计,为了易于安装调试与维护,机电系统采用模块化设计。
2. 4本章小结
本章节内容主要分析了防盗门生产企业现场的生产流程与喷涂工艺,阐述了目前中小型防盗门生产企业对于喷漆环节的现状,分析了当前企业对于防盗门喷涂机器人喷涂环节存在的不足与急需改善的问题。针对此类不足与问题,进行了需求分析,从而提出了系统包括外形检测系统设计、嵌入式系统设计、五轴控制系统设计、伺服驱动系统设计、传感器检测系统设计以及五轴机电系统设计的总体设计方案。

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









