





光幕喷涂机器人之检测点设计
时间:2017-09-14
阅读:7872

4. 4传感器检测系统设计
4. 4. 1检测点设计
喷涂机器人为五轴机械结构,根据其结构将各轴分解,获取各轴示意图,并在各轴设置监测点进行对运动部件的位置定位及控制信号获取。
(1)X轴检测点
在喷涂机器人中,X轴为水平方向,在X轴有效行程两端以内10厘米处设置限位开关,保证运动机构行进在有效行程范围内,并做出位置冗余避免机构碰撞。在有效行程的最左右两端设置行程开关,做机构极限位置报警与保护作用。同时,在距X轴最右端巧厘米处设置定位原点的限位开关。
X轴检测点具体情况如图4.7所示,
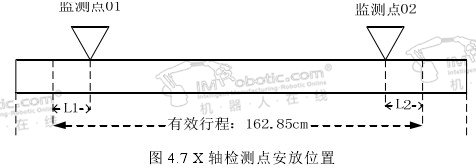
其中:L0=15cm, L1=L2=10cm,原点1作为原点定位信号,限位1、限位2作为机构左右运行极限位置定位信号,极限1、极限2作为机构故障,超过设定行程范围的报警信号。
(2)Y轴检测点
在喷涂机器人中,Y轴为垂直方向,在Y轴有效行程两端以内10厘米处设置限位开关,保证运动机构行进在有效行程范围内,并做出位置冗余避免机构碰撞。在有效行程的最上下两端设置行程开关,做机构极限位置报警与保护作用。同时考虑Y轴机构负载40Kg,故在距Y轴最下端20厘米处设置定位原点的限位开关。
Y轴检测点具体情况如图4.8所示,
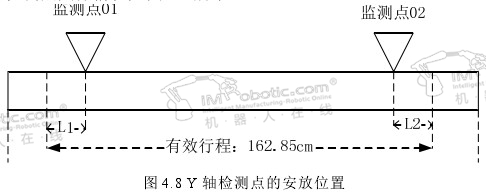
其中:L7= 5cm,原点3作为原点足位信号,极限5、极限6作为机构前后运行极限位置定位信号。
(4)P轴监测点
在喷涂机器人中,P轴为控制喷枪碰头旋转方向,在P轴下方0.5cm出设置限位开关,作为P轴原点定位。
P轴监测点具体情况如图4.10所示,
喷涂机器人
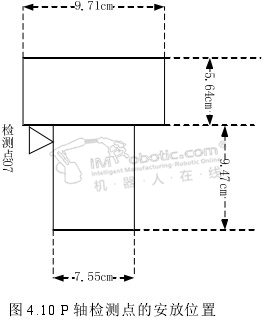
其中:L8=0.5cm,原点4作为P轴原点定位信号。
(5) R轴检测点
在喷涂机器人中,R轴为控制喷枪旋转方向,在R轴下方0.5cm处设置限位开关,作为R轴原点定位。
R轴检测点具体情况如图4.11所示,
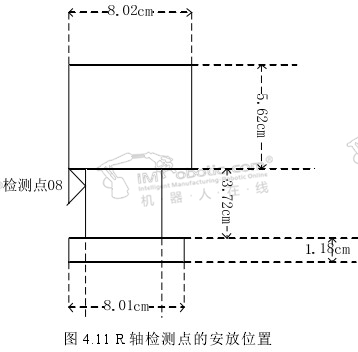
其中:L9=0.5 cm,原点5作为R轴原点定位信号。

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









