





光幕喷涂机器人提高响应快速性(上)
时间:2017-09-15
阅读:7879

光幕喷涂机器人提高响应快速性
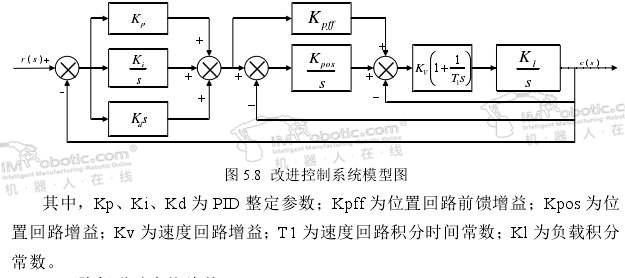
由于机构带负载后的影响,为了消除该积分环节的影响,将伺服电机中的光电编码器信号反馈入PLC构成闭环,使用PID控制进行调节,提高系统响应速度。
PID的控制结构,适合于一些较为简单的单输入单输出线性系统,而且对这些对象的自动控制要求是保持输出变量为确定的恒值,消除或减少输出变量与给定值之误差、误差速度等。
PID控制器的基本结构形式为:
连续形式的PID控制器

5. 2. 2. 3降低联动定位偏差
基于PLC的控制能力,系统中的PID模块可在PLC中编程实现。对于多轴的同一时刻到达预设位置控制,可以利用PLC的高速计数功能和伺服电机中光电码盘发出的高速脉冲信号反馈,根据预定脉冲数和实际脉冲数对比的情况,并结合项目可允许误差范围,通过PLC中断控制方式来实现。
具体流程如图5.9所示,
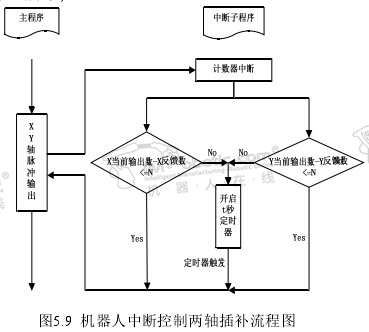
两轴喷涂机器人采用笛卡尔坐标系,水平竖直分别为X, Y轴。当PLC对X, Y轴输出达到预设值的n分之一时,计数器中断触发中断子程序。检测PLC对X, Y轴输出个数与编码器反馈个数差值大小。若差值不大于N个,返回主程序,X, Y轴继续高速脉冲输出;若大于N个,X, Y轴同时停止输出t时间后返回主程序继续输出。
5. 2. 2. 4实验与仿真
(1 )响应速度仿真与实验
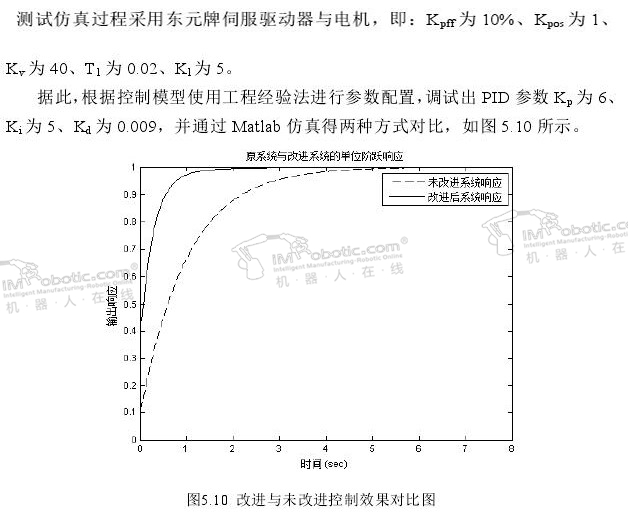
通过仿真计算可得在系统改进之后,延时时间由原来的0.6秒缩减为0.1秒,调节时间由原来的3.8秒缩减为1.1秒,响应速度明显增加。
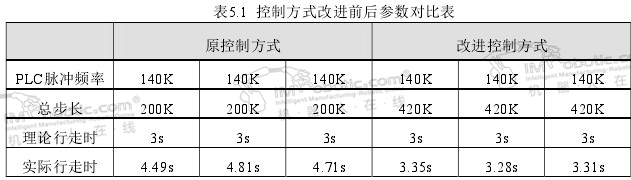
实验采用PLC所发频率为140K,行走3s的参数进行测试,得到原控制方式与改进控制方式对于位置控制,在时间效率上有显著提高。
具体对比数据如表5.1所示。
(2)两轴联动轨迹仿真
协同运动的优化目的主要为减小两轴在同一时刻到达位置的联动定位偏移,
从而降低轨迹偏差。故针对此系统在改进后的轨迹偏差效果进行仿真。模拟系统
带负载,建立在笛卡尔坐标系下的X, Y轴,行走出一条预设为y=x的直线轨迹。

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









