





光幕喷涂机器人中PLC控制实现
时间:2017-09-15
阅读:8930

光幕喷涂机器人中PLC控制实现
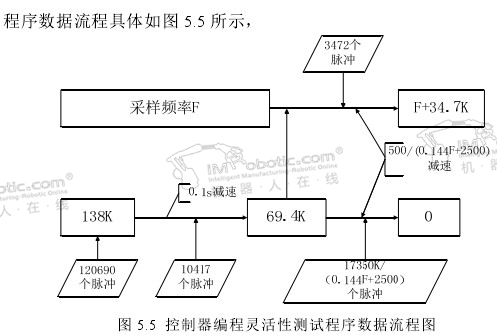
根据上节对于实际轨迹的分解并在其基础上计算所得的控制参数,控制器编程灵活性测试程序数据流程主要为:X轴先以采样频率F进行脉冲输出,Y轴以13 8Khz频率发送120690个脉冲后进入第一减速阶段,第一减速阶段通过发送10417个脉冲将13 8Khz频率在O.ls时间内降至69.4Khz。此时触发X轴加速,加速3472个脉冲后频率至F+34.7Khz,减速时间为500/ ( 0.144E+2500 ) s。而Y轴在输出频率达到69.4Khz以后,进入第二减速阶段,即在500/ ( 0.144E+2500 )s时间内发送173 SOK/(0.144F+2500)个脉冲将频率降至为0hz。
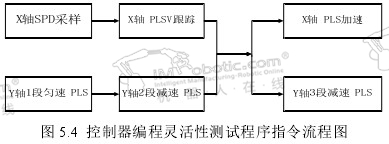
测试过程中,使用艾默生PLC。其程序指令使用流程如图5.4所示,
通过以上针对PLC控制器编程灵活性的测试,程序结果显示在测试过程中,PLC能较灵活的进行编程测试且能满足控制过程中所需的脉冲频率与喷涂精度,故在确保稳定性与可靠性的前提下,综合比较控制器的控制性能以及成本价格,并结合工艺需求的控制精度,在喷涂机器人设计中编程灵活性方面,PLC适合作为核心控制单元。
5. 2. 2多轴联动控制分析
由于机械结构具有惰性,运动控制器无法使执行机构在预定的时间点到达预定的位置。即在使用位置控制方式时,当上位机控制器PLC所发出一定个数的高频脉冲结束时,执行机构并没有达到预定位置,而是有一定的时间滞后现象。
由于此现象的存在,导致系统不能在某一时刻同时将各个关节电机转动到预定位置,致使末端位姿会发生偏移,控制出现偏差。故两轴机器人的联动控制会出现的主要问题包括:当机构带上负载后,在某一时刻同时将各个关节电机转动到预定位置的定位控制和在满足精度指标的前提下提高响应速度。
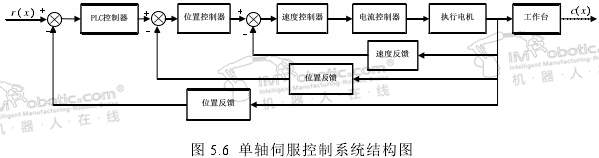
5. 2. 2. 1单轴控制结构
喷涂机器人的每一根轴都是一个伺服控制系统,内部构成主要有PLC控制器、位置控制器、速度控制器、电流控制器、执行电机和工作台。
其具体结构图如下图5.6所示。
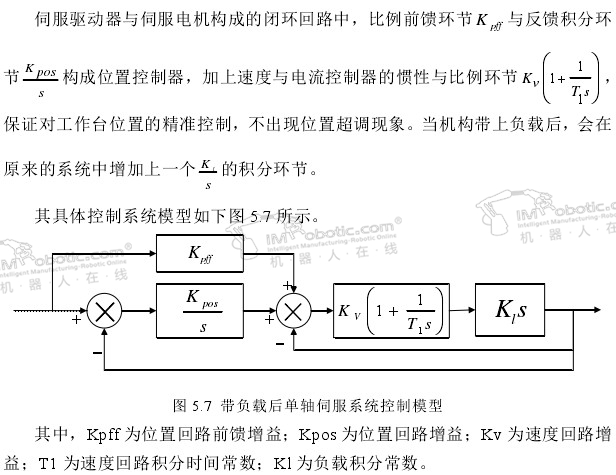
喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









