





光幕喷涂机器人之控制结构选择分析(下)
时间:2017-09-15
阅读:7313

具体X, Y轴对应位移速度关系如图5.3所示,
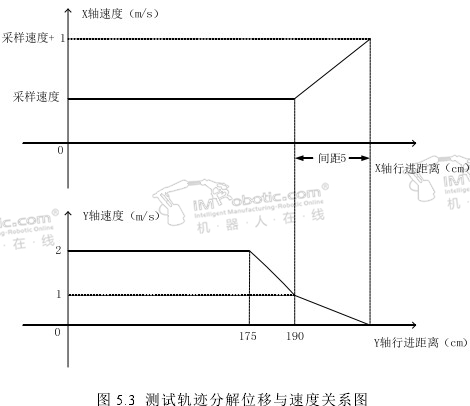
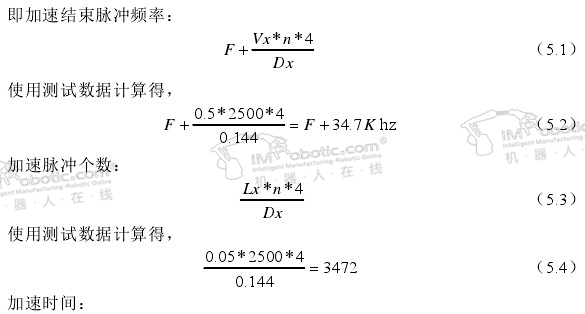
(1) X轴控制参数获取
X轴控制分为两个阶段,X轴采样跟踪阶段与X轴加速阶段。
X轴采样跟踪阶段主要为PLC控制器通过内部采样机构获取代表喷涂流水线速度的编码器脉冲信号,并采用驱动器速度模式输出控制X轴速度的相应频率脉冲,使喷涂机器人机构在X轴水平方向上与喷涂对象相对静止。即X轴跟踪由SPD指令采样得到线体频率F,并进行同频率输出做跟踪。
X轴加速阶段主要为PLC控制器通过对驱动器的位置模式控制,使喷涂机器人机构在原有跟踪的基础上加速向前行程相对移动,达到X轴方向上错位前移。
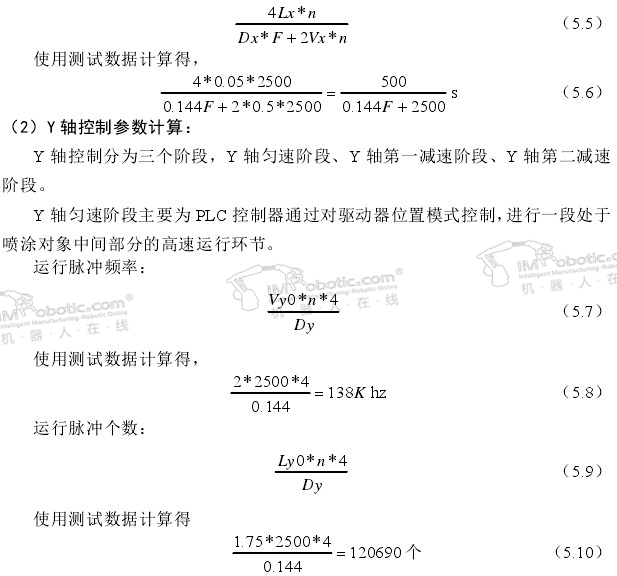
Y轴第一减速阶段主要为Y轴之前维持在一个较高速度运行下,若直接以一个较高加速度降为零值,则有可能会超出喷涂机构所能承受的最大加速度范围。若以一个较小加速度减速,则有可能导致无法保证在X轴运行结束时Y轴己减速至零。故对Y轴进行两级减速,第一减速阶段以一相对高的加速度减速。
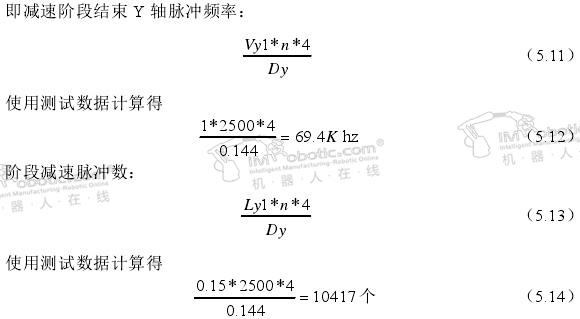
Y轴第二减速阶段主要为在第一减速阶段的大加速度减速后,以一相对小的加速度将机构在Y轴方向上减速至零,且在第二减速阶段的减速时间与X轴加速阶段的加速时间相同。通过对控制器Y轴输出参数设置,使用驱动器位置控制模式,对Y轴第二减速阶段进行脉冲输出控制。 喷涂机器人

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









