





AGV搬运机器人之底盘传感器安装位置设计(下)
时间:2017-09-19
阅读:13099

AGV搬运机器人之底盘传感器安装位置设计(下)
(4)电动推拉杆选型
举升机构是电动推杆与一个圆形托盘经卡槽相连接的机构。通过MCU可以控制电动推杆中电机的旋转,从而控制电动推杆的升降,最后使得托盘上升与下降,让货架举离地面进行搬运,以及放下货架完成作业。按照本文控制系统的需求,设定举升物体质量为80kg,重力G则为800N,所以电动推杆至少需要800N的推力。为了保证小车在托举重物时的稳定性同时兼顾使用效率,假设推动货架抬升0.05m需要的时间为3s,故抬升所需的平均速度约为17mm/s。通过对比选用了常州LOUIE公司的24VXTL 100的电动推杆作为机器人举升机构的抬举部分,如图2.17所示,额定工作电压为24V,最大推力1000N,举升的范围在0~100mm之间,最大推行速度为20mm/s,因此可以控制电机抬升0.05m使托盘上的货架完全离开地面。其中电动推杆自身带有行程限位开关,可以防止其在完个伸缩后电机空转而导致的烧机现象。

(5)电动推杆驱动器
电动推杆驱动器主要为电动推杆提供速度控制以及位置控制,保证仓储搬运机器人举升货架时候的稳定性以及速度的可控性。本文电动推杆驱动器选择成都爱控电子科技有限公司的AQMH361 SNS驱动器。如图2.18所示,此驱动器为H桥PWM变换器,通过改变PWM波的占空比从而改变平均电压最终控制电动缸的举升速度。

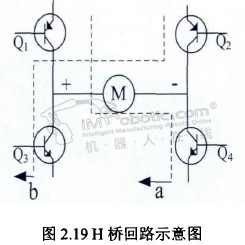
H桥PWM变换器的形式如图2.19所示,在通路a和通路b两种情况下,三极管两端导通,电机存在正负电压。通路a中电机加载正向电压,电机正转,推动电动推杆上升,反之通路b中电动推杆下降。通过MCU控制四个三极管导通、关断的时间(即PWM输出的时间)来控制电机两端电压的大小,从而控制推杆的升降速度。

搬运机器人,仓储搬运机器人控制系统设计与实现
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









