





笛卡尔坐标型码垛机器人机构运动分析及工作空间计算
时间:2017-09-25
阅读:13220

第二章码垛机器人机构运动分析及工作空间计算
2.1引言
近年来,工业机器人的研究引起了国内外科研院校的广泛重视。一般情况下,研究工业机器人首先要做的是对机器人结构,运动特性等进行分析,因为这是了解机器人性能特点的基础,也是对机器人进行动力学分析,轨迹规划以及其它更深入研究的前提。
本章的主要目的是通过对课题所涉及的码垛机器人进行结构及运动学分析,研究码垛机器人末端执行手爪的位置,速度与驱动机构之间的关系,进而对机器人的连杆尺寸参数进行优化设计以及工作空间进行计算,为后续的控制系统设计工作提供必要的理论依据。
2.2码垛机器人结构介绍
如图2.1所示,本课题研究的对象为一种吊臂连杆结构的码垛机器人。
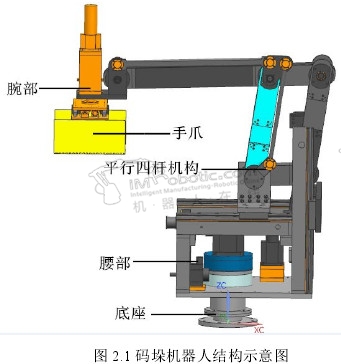
由码垛机器人的三维模型可以看出,该码垛机器人的结构主要由底座、腰部、平行四杆机构、腕部、手爪等部分组成。其中,底座为法兰状圆盘,用以同地面固定;腰部由伺服电机连接减速器驱动,实现机器人整体绕底座做旋转运动;平行四杆机构是一组并联机构,由两个伺服电机经同步带轮减速,驱动丝杠导轨滑块,分别控制机械手臂实现竖直和水平两个方向的直线运动;腕部由伺服电机直接驱动,用以控制机器人手腕处关节的旋转;手爪部分的张开和闭合由两个直线气缸控制。
机器人的腕部装有姿态保持装置,其主要作用是使末端手爪始终和水平面保持垂直的姿态。姿态保持装置的设计简化了码垛机器人的结构;降低了控制难度;同时也减轻了码垛机器人吊臂的承载负荷,使得机器人在选用同样功率的驱动电机情况下可以搬运更重负载。

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









