





笛卡尔坐标型码垛机器人的机构运动分析
时间:2017-09-25
阅读:10060

2.3码垛机器人的机构运动分析
机器人机构运动分析主要研究的是机器人运动的规律,而在研究中不考虑产生这些坛动的力和力矩,只涉及到机器人各个关节的位置、速度等相对于时间的函数。
在对机器人运动学进行分析时,一般采用D-H法。D-H方法由Denauit和Hartenbery于1956年提出,是描述各个连杆之间位置及运动关系的一种通用方法。在D-H法中需要对机器人机构进行坐标系建模,同时严格规定了每个坐标系的坐标轴,并对连杆和关节定义了an 、αn 、dn 、θn 四个参数。当关节变量己知时,可以通过运动学正解求得末端执行机构位姿;相反,已知末端执行机构姿态时,可以通过运动学逆解求得各个关节的变量。在运用D-H法时,运动学的正解释唯一的,但是运动学的逆解往往具有多个解。在本课题中的码垛机器人中既有串联结构又有并联结构,使用运用D-H求解变得过于复杂,在此提出了一种的几何的方法对码垛机器人进行运动分析。
2.3.1码垛机器人连杆机构分析
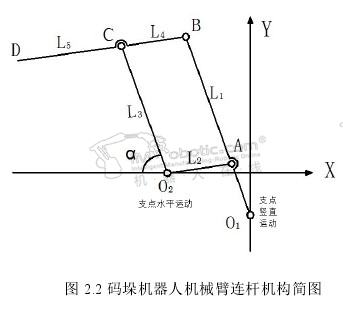
码垛机器人的的机器臂是一个平行四连杆机构。连杆O1B, O2A, O2C, BC, CD的长度分别为L1,L2,L3,L4,L5。O1为Y轴运动方向的丝杠导轨滑块与连杆L1的铰接点,OZ为X轴运动方向的丝杠导轨滑块与连杆L2, L3的铰接点,当两个方向的伺服电机分别通过同步带驱动滑块做竖直、水平方向的运动时,机械臂末端D点将会做相应的移动。如图2.2所示为码垛机器人机械臂连杆机构的简图。
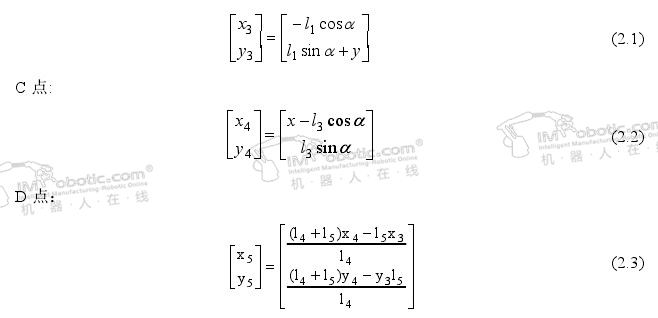
在此,由于 O1, O:分别只在Y轴、x轴运动,则两个支点的坐标可以分别设为(0,y), (x, 0).L3与x轴负方向的夹角为α,则根据几何关系得出其它各点的坐标表示。其中,B点:

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









