





笛卡尔坐标型码垛机器人轨迹规划的方式
时间:2017-09-25
阅读:13735

3.2.2轨迹规划的方式
目前,码垛机器人最常用的轨迹规划方式主要有两种,即直角空间轨迹规划和关节空间轨迹规划
直角空间轨迹规划要求给出机器人末端执行机构期望运动路径的解析式,而机器人相应的关节位置、速度、加速度则由末端机构的位姿信息导出。
直角空间坐标规划的优点主要有轨迹路径直观,运动路线准确性高;特别适用于某些对直角坐标轨迹有特定要求的工作任务。直角空间坐标规划的缺点也很多,比如计算量大;控制时间间隔较长;不能保证除运动路径外的其它点都在机器人的工作空间,规划出的轨迹有可能处于工作空间盲点等。
关节空间轨迹规划是间接求解末端路径的方法,在使用时首先要将各个关节变量表示为一个关于时间的函数,然后用这些关节函数以及关节函数的导数来描述机器人末端执行机构的预期运动。
关节空间轨迹规划的优点主要有可以直接用运动的受控变量进行轨迹规;规划方式实时性较强;比直角坐标规划运算简单。关节空间轨迹规划的缺点是不能对运动中其它构件进行实时准确地定位。
3.2.3直角坐标空间轨迹规划算法
直角坐标空间轨迹规划需要通过插补算法在直角坐标系中获取轨迹的中间点,是直接对码垛机器人末端机构的位置进行取值规划的控制。在求解过程中,常用到直线插补算法和圆弧插补算法。
直线插补算法相对简单,它是在己知该直线始末两点的位置和姿态的条件下,通过插补计算最终求得各轨迹中间点的位置和姿态的一种算法。直线插补算法如图3.1所示。
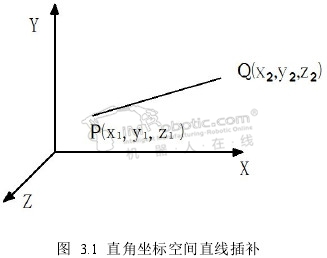
已知直线起止两点的坐标分别为P(x1,y1,z1),Q(x2,y2,z2)。设v为要求沿直线PQ运动的速度,t为经过这条直线的插补时间间隔。
计算直线长度:


码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









