





笛卡尔坐标型码垛机器人关节空间轨迹规划方法
时间:2017-09-25
阅读:15195

笛卡尔坐标型码垛机器人关节空间轨迹规划方法
在进行关节空间轨迹规划时,首先由运动学逆解求得轨迹点对应的各关节的角度值,然后通过计算得出各个关节的平滑函数。为了更好地确定工具坐标系的位姿,需要保证各个关节在同一时间到达目标路径点。相比之下,关节空间轨迹规划比直角空间轨迹规划计算更容易。常用的关节空间轨迹规划方法主要有三次多项式插值法,高次多项式插值法等。
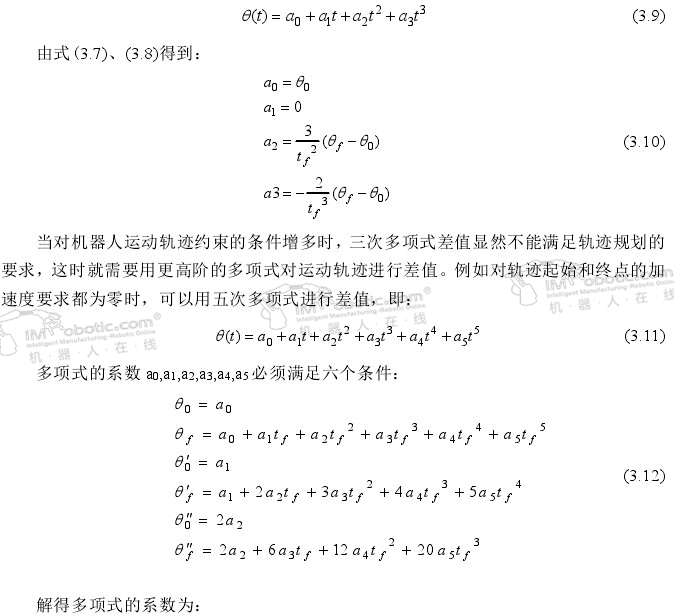
应用三次多项式差值法进行轨迹规划时,先用一个通过起始点和终止点的平滑轨迹函数θ(t)来表示末端执行器的运动轨迹,为了实现末端执行器的平稳运行,至少需要两端点位置约束和两端点速度约束四个约束条件。设θ(t)在时刻t=0时的起始关节角度为θ0,在终止时刻的关节角度为θf为了满足运动速度连续,一般要求起始和终止的速度为零,即:

限据式3. 7中的四个约束,可以唯一地确定一个三次的多项式,即:
3.3码垛机器人轨迹规划任务描述
码垛机器人的手爪在抓取物料时,为了防止物料与工作台之间发生摩擦,手爪提升的方向必须与工作台的平面保持垂直;当手爪堆放物料时,手爪下降的方向也必须与工作台的平面保持垂直。因此,码垛机器人在完成一次抓、放料过程中必须经过起始点,提升点,下放点,终止点四个位置。
为了保证码垛机器人运动的连续性和平稳性,定义了如下四个约束条件,即:
(1)手爪起始点位置给定,起始位置速度加速度为零;
(2)手爪提升点位置给定,提升位置速度和加速度连续;
(3)手爪下放点位置给定,下放位置速度和加速度连续;
(4)手爪终止点位置给定,终止位置速度和加速度为零。
由以上四个约束条件可知,当手爪由初始点运动到提升点以及从下放点运动到终止点的过程中,只有竖直方向的伺服电机驱动;手爪从提升点运动到下放点过程中,则由腕部旋转电机、腰部旋转电机、水平方向驱动电机和竖直方向驱动电机共同驱动。
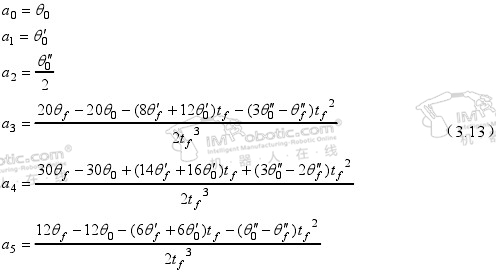
结合工业机器人常用的轨迹规划的方法以及本课题中码垛机器人轨迹规划的任务描述,提出了两种轨迹规划的方法:运用“4-3-4”三段轨迹法对手爪竖直运动关节进行轨迹规划结合五次多项式差值对手爪水平运动关节和旋转关节进行轨迹规划;采用三次样条曲线对机器人的加、减速过程轨迹进行规划,实现码垛机器人的柔性加减速控制。

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









