





码垛机器人三次样条曲线轨迹规划的MATLAB仿真
时间:2017-09-26
阅读:12814

码垛机器人三次样条曲线轨迹规划的MATLAB仿真
根据本课题中码垛机器人的工作速率要求,拟定了各关节的最大速度、加速度及加速时间参数如表3.2所示。
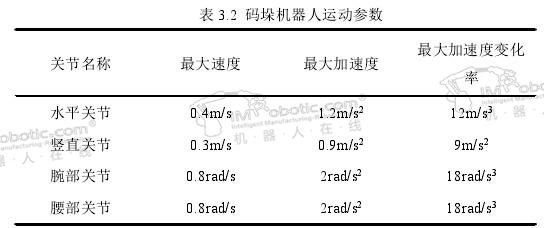
根据表3.2所列参数,可以计算出水平关节加速阶段所用的时间为0.433s,轨迹方程为:
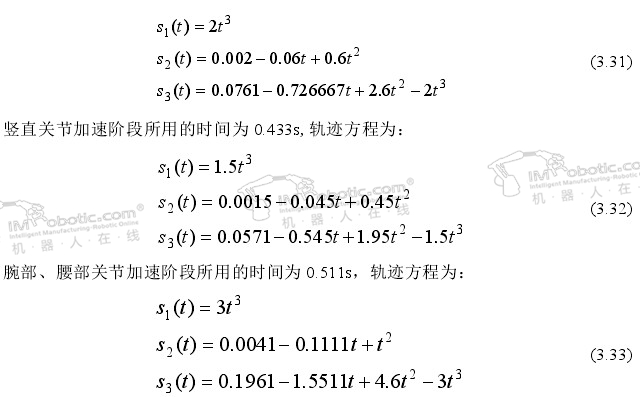
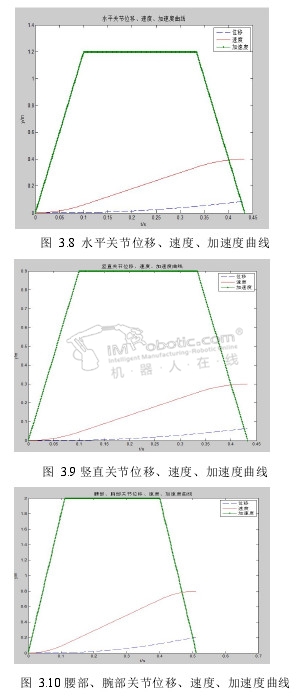
将式3.31, 3.32, 3.33分别输入到MATLAB中,利用MATLAB的绘图功能绘出码垛机器人各个关节在加速过程中,位移、速度、加速度随时间变化的曲线如图3.8, 3.9,3.10所示。
从图3.8, 3.9, 3.10可以看出,机器人水平、竖直、腰部、腕部等各个关节加速过程中的速度曲线都呈现S型。通过轨迹规划,使得机器人在最短时间内柔性加速到最大的运动速度,实现了机器人的柔性加减速的控制,减小了机器人工作过程中的冲击和机械磨损,提高了机器人的工作的效率。
3.6本章小结
本章首先介绍了工业机器人轨迹规划的一般问题以及轨迹规划的常用方法,然后针对本课题中的研究对象,提出了两种可行的轨迹规划方法。其中“4-3-4"三段轨迹法结合五次多项式插值法可在己知机器人运动轨迹中若干路径点及运动时间条件下运用,这种方法可以保证机器人运动过程中的平稳、无冲击;三次样条曲线法可以在己知机器人工作允许的最大速度、最大加速度、最大加速度变化率的条件下使用,实现机器人的柔性加减速控制。为了求证方法的准确性,在本章中还运用MATLAB软件对这两种方法分别进行了验证。
通过轨迹规划,我们可以得到码垛机器人的运动轨迹方程,为后续码垛机器人控制系统的设计,提供了理论依据。

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









