





码垛机器人三次样条曲线轨迹规划及仿真
时间:2017-09-26
阅读:10533

码垛机器人三次样条曲线轨迹规划及仿真
3.5.1三次样条曲线轨迹规划
为了防止机器人在启、停过程中出现加速度的突变,需要将机器人各个关节的速度特性曲线由原来的T型变成s型。S型速度曲线平滑、没有冲击,它的形状如图3.7所示。
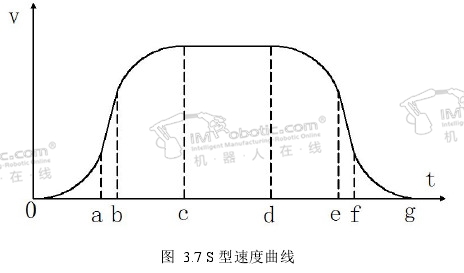
由图3.7可以看出,S型速度曲线可以分为七部分。第一部分从0到a阶段,加速度从零开始逐渐增大;第二部分为a到b阶段,加速度达到最大且保持不变;第三部分为b到c阶段,加速度随时间的推移逐渐减小;第四阶段为c到d段,此阶段为匀速运动阶段,加速度为零。第五到第七阶段与第一到第三阶段正好相反。
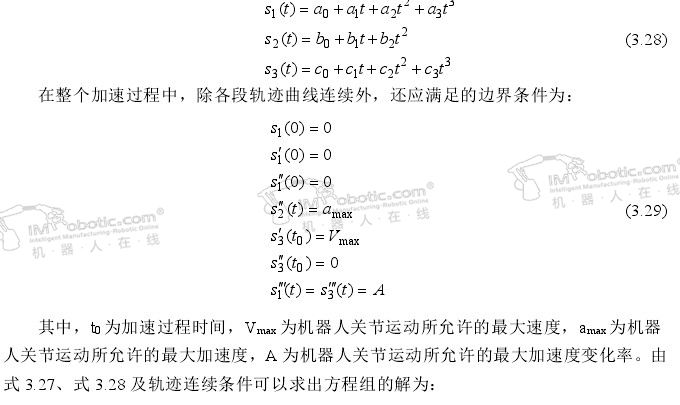
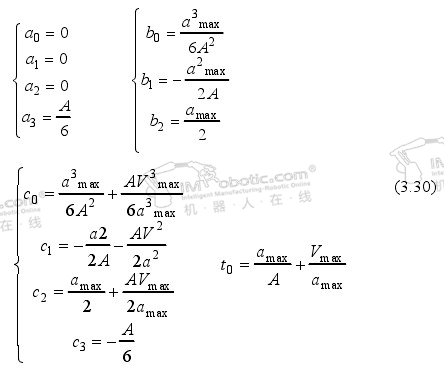
在工业机器人控制系统中,一般采用样条曲线对S型速度曲线进行拟合。一般所选样条曲线次数越高,其运动越平稳,但是随着次数的增高,加速时间也会相应越长。结合本课题中码垛机器人的特点,采用三次样条曲线对机器人的运动轨迹进行规划。由于第四阶段为直线不需要拟合,且第五、六、七阶段的曲线可由第一、二、三阶段曲线镜像、平移得到,所以只需对第一、二、三阶段进行规划。定义码垛机器人第一、二、三阶段的运动时间分别为t1、t2、t3,各段轨迹的多项式分别为s1(t1)、s2(t2)、s3(t3),则对于这三个阶段的轨迹方程为:

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









