





笛卡尔坐标型码垛机器人位置示教程序设计
时间:2017-09-27
阅读:11444

5.3.3码垛机器人位置示教程序设计
在欧姆龙CP1H存储器内部有15360点的特殊辅助寄存器,用于存储PLC的工作状态信息。其中A276至A279, A322至A325等8个通道为PLC四个高速脉冲输出口的脉冲输出当前值存储位,用于保存从脉冲输出端口输出的脉冲数。向CW方向的脉冲输出,每个脉冲++1;向CCW方向的脉冲输出,每个脉冲一1。码垛机器人位置示教的功能就是通过该8个通道的输出脉冲数存储功能实现的。进入程序后,首先对机器人所处位置进行判断,如果不在原点,则立即报警。确定机器人处于原点后,控制机器人各个关节依次完成取料、放料点的示教,对机器人各个关节位置示教程序流程如图5.3所示。
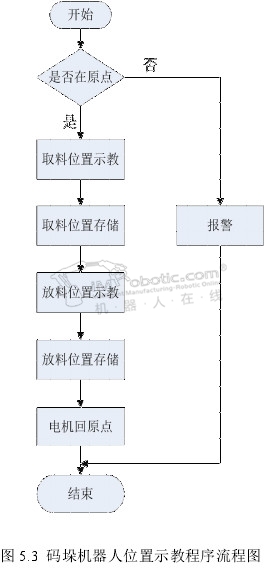
位置示教过程不是自动完成的,而是需要配合触摸屏示教界面通过操作人员手动完成。通过位置示教,既提高了码垛机器人的定位精度,又增强了机器人对外界环境的适应能力。
5.3.4码垛机器人原点搜索程序设计
码垛机器人在进入连续运动模式以及位置示教模式前,都需要进行原点搜索。原点搜索的目标是使水平、竖直、腰部、腕部伺服电机都达到原点。这一功能的实现需要借助分布在各个关节的接近传感器来完成。原点搜索程序的流程如图5.4所示。
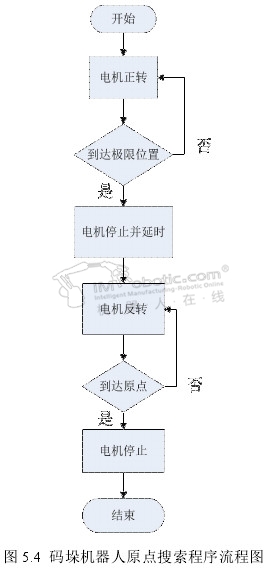
因为在原点搜索过程中各轴会到达极限位置,为了避免在此过程中出现意外,需要各轴单独依次进行原点搜索操作。

码垛机器人,码垛机器人控制系统的设计及实现
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









