





CAD导航的焊接机器人离线编程的统数据库的连接与操作(下)
时间:2017-10-10
阅读:7634

.jpg)
CAD导航的焊接机器人离线编程的统数据库的连接与操作(下)
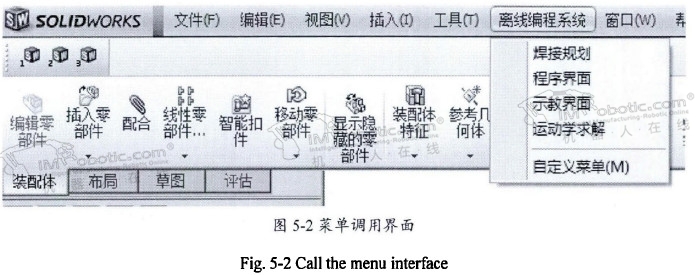
本文开发的CAD导航的离线编程系统加载到SolidWork:菜单栏的效果如图5-2所示。界面如同软件自身具有的菜单滇正做到了用户模块与软件本身一体化。其中,“离线编程系统”菜单被添加到了SolidWorks框架的顶层菜单中,主要作用是打开系统的子菜单;“焊接规划”,“程序界面”、“示教界面”和运动学求解四个菜单以子菜单的形式出现,是实现系统功能的执行菜单。为了避免用户误操作,设置“示教界面”为整个离线编程系统的启动菜一单,其他三个一J毛菜一单在系统启动,自检测日常后生效。
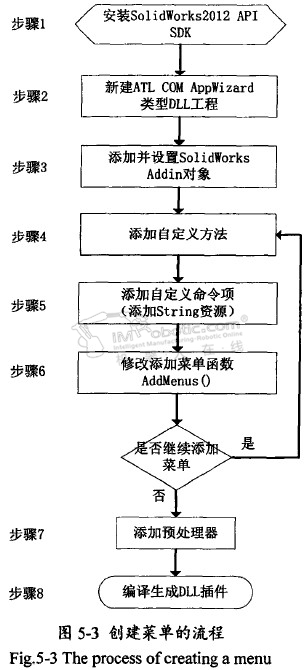
创建上述SolidWorks菜单插件的关键步骤是:创建ATL COM AppWizard类型工程,添加工程与SolidWorks的连接,根据SolidWorks提供的菜单栏、状态栏以及工具栏的创建方法,有选择的添加菜单创建代码。用户菜单代码的主要内容包括菜单名称、菜单创建的位置以及响应菜单命令的方法。具体流程如图5-3所示。
步骤1中的API SDK是整个二次开发的基础类型库和系统接口。步骤2确定了二次开发模块的类型和使用VC++系统创建离线编程系统程序代码框架。步骤3创建了离线编程系统框架与SolidWorks2012的通信接口。
步骤4至步骤6是菜单的代码实现过程。其中,自定义方法是实现菜单功能的SolidWorks控制代码,决定了点击菜单命令时菜单的命令响应。自定义命令项的主要内容包括添加的命令项显示内容、响应函数和提示信息。AddMenus()函数提供了在软件主框架、零件框架、装配体框架和工程图框架四种文档格式下添加菜单的代码样式。重复步骤4至步骤6便可以添加多个菜单项。
完成菜单代码添加工作并编译成功后,运行SolidWorks2012软件,通过[工具]菜单加载插件,即可出现如图5-2所示的菜单界面。离线编程系统以菜单的形式加载到三维软件框架中,用户使用更为方便灵活,SolidWorksAPI接口提供的响应函数方法也为开发焊接机器人的离线示教、程序界面和焊接规划界面奠定了良好的基础。

焊接机器人,CAD导航的焊接机器人离线编程系统研究
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









