





焊接机器人的焊接路径规划的实现
时间:2017-10-10
阅读:12686

.jpg)
焊接机器人的焊接路径规划的实现
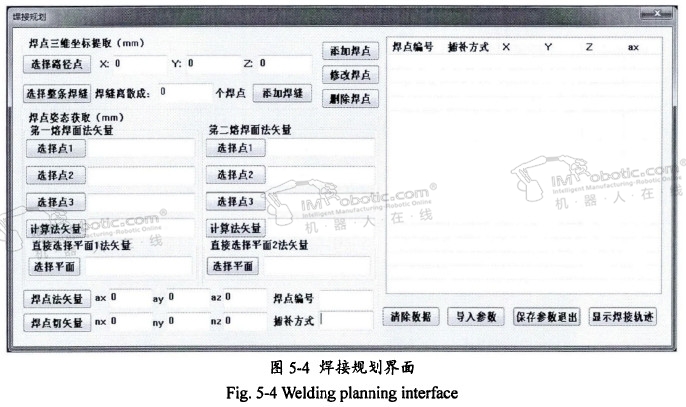
CAD系统图形环境中的焊接作业路径规划是通过人机交互实现的。基于CAD软件强大的智能指针功能和开放的用户接口,通过鼠标简单拾取和调用后台程序即可快速规划出焊接作业路径,并建立关键路径点的位姿矩阵。根据第四章CAD导航的焊接路径规划方法焊缝关键路径点位姿矩阵表示法,本文建立的人机交互界面如图5-4所示。
实现方法和步骤如下:
1、基于5.2节系统框架,在资源视图界面中,添加对话框资源,并借助于VC++控件布局设计焊接规划界面。
2、为新添加的对话框创建类和添加非模态对话框初始化代码。
3、在对话框头文件中添加SolidWorks类型库,使得VC++可以按照SolidWorks的格式调用API的函数。
4、在对话框类中添加成员函数和成员变量,用于实现对话框与SolidWorks对象的连接。应当注意,链接SolidWorks对象的成员变量为SolidWorks接口对象的智能指针类型,例如,文中为焊接规划对话框添加的成员变量为
CComPtr<IS1dWorks>mes iSldWorks dlgl,成员函数为:getSWGJGH(IS1dWorks *Sw),连接对话框与SolidWorks对象的代码为this->m iSldWorks dlgl=Sw
5、在5.2节中步骤4中提到的通信接口的自定义方法中添加调用非模态对话框代码。这是响应“焊接规划”菜单命令的代码。
6、为界面中的控件添加消息响应函数。按照界面的设计思路,可通过双击相应的按钮控件或者利用MFC Class Wizard向导添加功能函数,用于实现焊缝信息提取、轨迹规划、焊缝点存储与显示。
实现焊接规划界面功能需用到的API函数主要有:选择管理器对象(ISelectionMgrInterface)的IGetSelectionPoint()和get INormal()函数,它们分别用来获取CAD实体模型中的点信息和面的法向量信息;草图管理对象(ISketchManager Interface )的插入3D草图函数(lnsert3DSketch())以及直线、圆弧等其他绘图函数,这些函数用于实现将焊点坐标系绘制在系统中。 焊接机器人

焊接机器人,CAD导航的焊接机器人离线编程系统研究
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









