





视觉引导搬运机器人之系统的硬件设计(上)
时间:2017-10-12
阅读:10038


2.2视觉引导机器人系统的硬件设计
视觉引导搬运机器人系统的整体架构分为硬件平台系统、运动控制系统、图像采集系统、图像处理系统(多目标识别系统、目标定位系统)四部分组成。
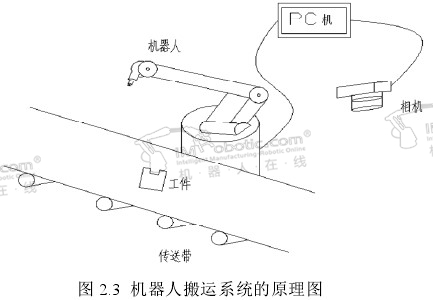
现在分别介绍如下:硬件平台主要由EPSON工业机器人、输送带、伺服电机、PLC, CCD相机、镜头、图像采集卡、工控机、相机可调支撑等其他部件,主要对整个检测系统提供硬件的支持;构建视觉引导机器人系统,根据实际的工控需求对器件进行一定的选型,设计基本的实验框架方案,视觉引导机器人系统原理图图如图2.3所示。
2.2.1EPSON六自由度机器人系统
EPSON工业机器人系统包括EPSON机器人本体、C3-A600S}RC180机器人控制器以及支持与PC机进行通讯的软件EPSON RC+ 5.0。其中机器人的本体为垂直6轴型工业机械手,各个运动轴之间的相对运动由安装在机器人内部的交流伺服电机来完成,其重复定位精度为士0. 08mm。搬运机器人的用于抓取目标工件的机构为真空吸盘。
2.2.2系统相机及镜头的选用
(1)电荷祸合器件图像传感器(Charge Coupled Device CCD)当前广泛应用于与机器视觉有关的项目中,它是一种在大规模硅集成电路的基础上,开发出得一款模拟集成电子芯片的新型固体成像器件。其具备光电转换和电信号的存储、转移和独处的功能。由于CCD相机可靠性好、功耗低、寿命长且灵敏度较高,因而在实际项目中得到广泛的应用,近年来发展迅猛。
(2)CCD相机镜头的选用
焦距是镜头的关键参数。为了在CCD芯片上完整成像,我们需要为目标的高度和宽度计算焦距,较小的值为我们的镜头焦距,主体的计算公式如下所示。


搬运机器人,基于视觉引导的搬运机器人多目标识别及抓取姿态研究
技术干货

好的文章,需要您的鼓励
18

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









