





视觉引导搬运机器人之系统的硬件设计(下)
时间:2017-10-12
阅读:7662


视觉引导搬运机器人之系统的硬件设计(下)
其中,f表示镜头的焦距,u表示物距,其实是目标工件表面到镜头的球心的距离,v表示像距,实际上指透镜球心到CCD靶面的距离,通过上式通过参数之间的相互补偿,常规的是先预估一个工作距离,然后选择镜头的焦距,由于镜头的焦距是有固定的生产规格,所以当选定最接近的镜头后,反过来将焦距f带为标准量,求取工作距离,像距可以通过相机的截圈微调进行调整。
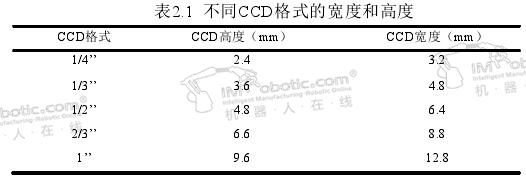
CCD尺寸是指CCD芯片的对角线尺寸,用英寸表示,如1/4", 1/3", 1/2",2/3", 1“等,在这里1英寸为16mm。一般来说CCD尺寸越大越好,CCD尺寸越大其灵敏度就越高,表2.1是不同CCD尺寸的宽度和高度。
将实际的工作距离参数带入式2.1,即可得出相应的结果,然后将镜头通过相关的装置进行为调节,达到最佳的成像效果。
本系统选择的是日本TOSHIBA公司生产的SHIMURA-P64相机。相机的垂直扫描频率为59.9kHz,水平扫描频率为15.7kHz,其中CCD总像素为1280x1024,相机的信噪比大于48dB。此CCD相机的工作电压为SV一12V DC,镜头接口为C-mount接口。系统选用的镜头是日本COMPUTAR公司的M1614-MP定焦工业镜头,镜头参数如下:焦距f--16.Omm,光圈值=F1.4-16C。成像适合本系统的 要求。 搬运机器人

搬运机器人,基于视觉引导的搬运机器人多目标识别及抓取姿态研究
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









