





视觉引导搬运机器人之PC机及图像采集卡
时间:2017-10-12
阅读:9166


视觉引导搬运机器人之PC机及图像采集卡
2.2.3PC机及图像采集卡
图像采集卡是一种安装在PC机上,可以使PC机能够对相机采集到的图像信息进行批量处理的接口设备,在具备数据缓存功能的同时,一方面能够对接收到的相机的模拟图像信号进行采集,另一方面,还可以提供计算机的高速接口。
由于图像采集卡需要对传输速度高、数据信息量大的采集到的图像进行采集,所以,在实现对图像数据的A/D变换之后,为使图像采集卡能更好的应用于实际项目当中,仍然需要实现以下功能:接收相机采集到的图像的模拟信息,利用传输总线将接收到的数据储存到视觉引导系统的数据存储器中;图像采集卡对接收到的相机的采集到的模拟信号进行解读和还原,可以是相机拍摄到的图像再次呈现;能够实现对视觉引导系统其它视觉部件的执行功能进行控制。
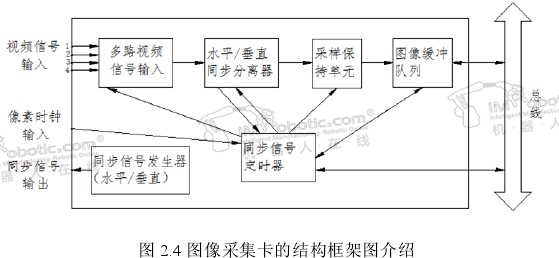
如下图2.4所示,是关于图像采集卡的整体结构和功能作用的介绍框图。其主要部件包括:同步信号分离器、采样信息保持单元、图像信息缓冲队列等。同步信号分离器的作用是把接收到的图像信息中的属于同步脉冲的信号提取出来。水平同步信号指的是模拟图像的初始行,垂直同步信号指的是接收到的模拟图像的新一帧的开始。经A}转换模块后,为了得到采集图像保真度较高的数字图像,数模转换需等到行和帧的同步都达到稳定的程度。采样保持单元的作用是把接收到的模拟图像的信息转换为数字信息,并把数字化的信息数据存储在缓冲队列当中,为之后的PC机对采集图像信息进行处理做好准备。
结合实际情况,本系统选择的PC机为英特尔ICP/iEi B188(英特尔Pentium双核2.80GHz, 2G内存,Windows XP操作系统)台式机。选用的图像采集卡型号为北京嘉恒中自公司生产的OK C61 A。该型号的图像采集卡基于PCI总线,可采集彩色和黑白图像,所采集的图像数据可达1 Obits,最大分辨率为1280 X 1024,最大点频为15M,支持8bits数据格式RGB32, RGB24, RGB16, RGB15, YUV422,黑白图像GRAY8和l Obit数据格式RGB30,输入路数可选择六路复合视频输入或二路Y/C (5+6,3+4 )输入,输入视频为12位A/D,有梳状滤波器,抗混叠滤波器,亮度、对比度、色度、饱和度软件可调,支持LINUX和WINDOWS系统。 搬运机器人

搬运机器人,基于视觉引导的搬运机器人多目标识别及抓取姿态研究
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









