




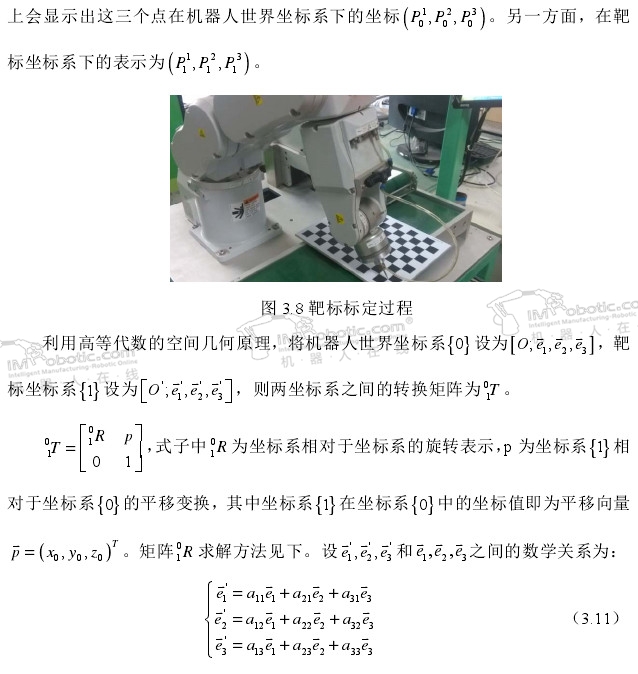
搬运机器人世界坐标系和固定靶标坐标系的转换矩阵
时间:2017-10-13
阅读:15144


3 .2机器人世界坐标系和固定靶标坐标系的转换矩阵
3.2.1直接标定法求转换矩阵
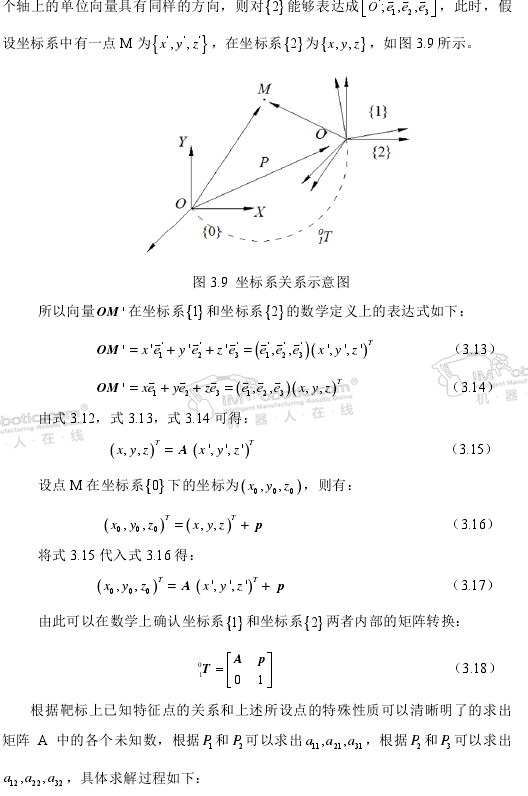
上述3.1节已求出相机坐标系和位于皮带上的固定靶标坐标系之间的转换矩阵关系BCT,下面介绍搬运机器人世界坐标系和皮带上的固定靶标坐标系之间的转换矩阵WBT的求取,通常求皮带上的固定靶标坐标系和机器人世界坐标系的关系,采用直接标定的方法,根据放置在皮带上的固定靶标中的坐标已知的特征点来求出转换关系。
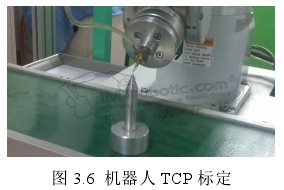
(1)机器人TCP (Tool Center Point)工件坐标系的建立:伴随着机器人世界坐标系和靶标坐标系的建立,为了精确的确定靶标上的特征点。通常在机器人末端法兰盘上装配一个ZERO-TOOL尖点,从而使尖点成为机器人的末端坐标。再通过机器人TCP工具的标定功能,使尖点在三维空间的四个方向来触碰同一点,即完成此标定。如图3.6所示。
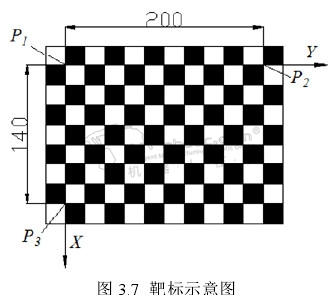
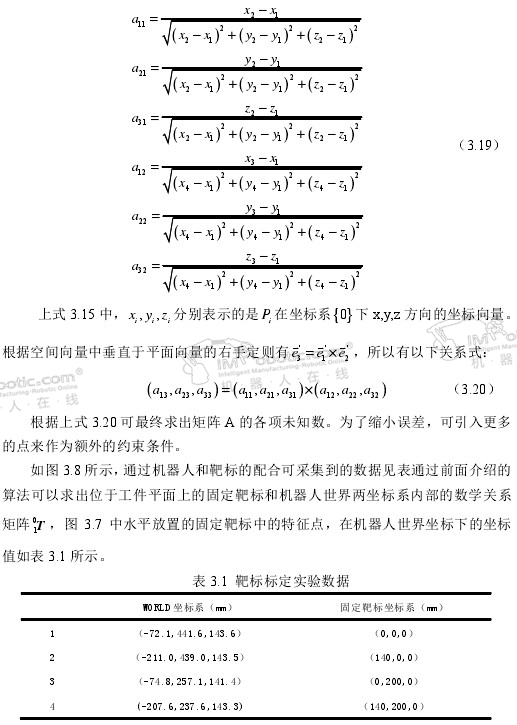
(2)固定靶标坐标系的建立:如图3.7所示,设靶标左上方角点月为靶标的坐标原点,水平横向设为Y轴方向,垂直向下设为X轴方向,设与靶标平面垂直向上为Z轴方向。图中相邻两个角点之间的长度为20mm,图中三点可依次表示为P 1(0,0),P2 (0,200),P3(140,0)。
(3)机器人世界坐标系与皮带上的固定靶标两者的关系;将TCP尖点分别接触靶标上的三个已知点P1,P2,P3,如图3.8所示,此时,在机器人的PC机控制软件
利用上面计算方法求得矩阵:
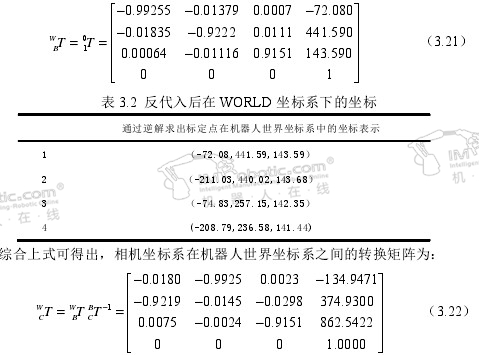
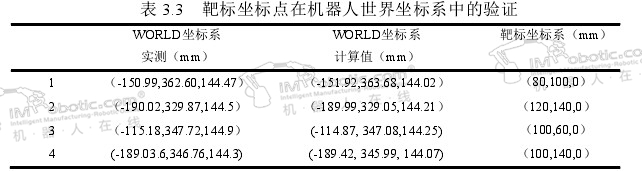
3.2.2结果验证
根据相机内、外参标定结果、标定板角点的像素坐标,可求出任一角点在相机坐标系中的坐标,代入上述矩阵可求出理论上的搬运机器人世界坐标系值,与实测值进行验证如表3.3所示。

搬运机器人,基于视觉引导的搬运机器人多目标识别及抓取姿态研究
技术干货

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









