





四自由度码垛机器人结构设计
时间:2017-12-01
阅读:13337

四自由度码垛机器人结构设计
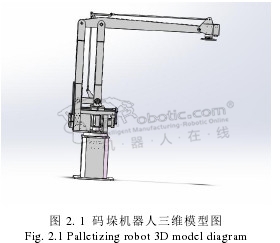
本文设计的码垛机器人主要的核心机构有基座、腰部机构、臂部机构、末端执行机构以及相应的辅助连杆,主要活动部位包括腰部、臂部、腕部以及末端执行器。采用solidworks建立三维模型如图2.1所示。
(1)基座
基座是用来与地面进行固定的,承载了码垛机器人的大本分力量,也是连接腰部的机构,所以要求要有较强的刚度、强度以及稳定性。
(2)腰部机构
图2.2为码垛机器人腰部机构图。码垛机器人腰部承载着腰部以及腰部以上所有机构的重量,在这里主要有减速器、伺服电机、竖直丝杆、水平丝杆、竖直滑座、水平滑座等构成,通过伺服电机带动同步带的转动,然后使得丝杆前后(上下)运动,带动水平滑座(竖直滑座),进而带动臂部机构的水平运动(竖直运动)。之所以将伺服电机安装在腰部而不安装在臂部,其主要原因在于减小臂部的重量,使得臂部在运动时,惯性降低。
(3)臂部机构
图2.3码垛机器人臂部机构图,其中左图为机械结构图,右图为工程图(尺寸单位: mm)。臂部机构主要有前大臂、后大臂、以及小臂组成。在机构小臂、前后大臂及腕部都包含有单个回转关节,若腰部电机处于工作状态时,前后大臂将会绕对应轴摆动,从而使得小臂在垂直方向上做平面运动,小臂带动腕部结构实现前后方向的平动,借助辅助结构(由三脚架、大臂及小臂连杆构成)确保腕部结构旋转轴在运行过程中同地平面垂直。
前大臂与小臂和水平滑座各有一个回转关节。工作时,伺服电机带动水平丝杆运动,进而带动水平滑座做水平运动,然后带动前大臂做前后运动。后大臂与前大臂相似,在这不做过多赘述。


机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









