





码垛机器人减速机种类
时间:2017-12-05
阅读:10278

码垛机器人减速机种类
码垛机器人减速器是连接原动机同工作机构的闭式动力传递设备,其主要作用是降低输出转速,并且增加输出力矩,从而符合应用需求。对于机器人而言,要求的精度很高,而且需要有很大的转矩,刚度要大,回程间隙小,回程间隙小,承受倾覆力矩大。目前,市场上符合此类型的减速机很多,常见的有星形减速机、RV减速机、谐波减速机等等。以下详细介绍几种减速器。
(1)行星减速机
它内部含有三大重要传动结构:太阳轮、行星轮,内齿圈,它是由一个内齿环A紧密结合于齿箱壳体上,环齿中心安装有太阳轮B,并作为动力输入端,A与B间安装有3个行星轮C,该组行星齿轮依靠著出力轴、内齿环及太阳齿支撑浮游放期间;行星减速机当入力侧动力带动太阳轮转动后,便会使行星轮产生自转,同时还会沿着内齿圈绕太阳轮中心轴做公转运动,游星之旋转带动连结放托盘之出力轴输出动力。其特点在于体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低、输出扭矩大,速比大、效率高、性能安全。行星减速机含有众多类型,例如WGN定轴传动型、弹性均载少齿差型等,并广泛应用于各行各业的生产制造设备中,例如起重货运、工程设备、车辆、仪表、船舶、石油化工、矿山开采、航天仪器等。可是该类减速器制造要求精度高,应用于要求结构比较紧凑的传动机构。
(2) RV减速器
该类减速器传动机构包含有两级行星减速机构,第一级是由渐开线齿轮构成的,第二级是由摆线齿轮构成的,属于闭式差动轮系,图2.4是其结构原理图。太阳轮1同动力输入端连接,若轮1沿着逆时针方向转动,将会带动3个沿圆周方向均布的行星轮2绕自身中心轴顺时针方向转动,此外还会绕轮1轴心公转,曲柄轴3同轮2相连并以相同速度旋转,两个均布在圆周方向的摆线轮4同轴3铰接,并同固定安装的针轮啮合,运动过程中,轮4将会绕针轮轴线公转,同时也会绕自身轴线沿逆时针方向自转。行星架6为装置输出机构,通过安装在其内部的3对曲柄轴支撑轴承提供输出力矩,将轮4的自转矢量按照1:1比例输出。该类减速器优势为:传动比调整区间大;可提供非常大的扭转刚度,因为行星架6左右两端都含有支承,其左端圆盘刚度较大,同负载机构以螺栓相连,其扭转刚度要比普通摆线减速机大出很多。在额定力矩条件下工作时,具有较小的弹性回差;若设计规范,并能确保有效的加工及安装精度,便能使减速器具有较高精度及非常小的回转间隙;工作效率较高;外形较小,并能传递更大的力矩和功率,因为该类减速机含有两级,第一级使用3个行星轮,尤其是第二级,摆线针轮属于硬齿面多齿啮合,如此使其拥有更大的承载力矩,并可减小自身体积,此外从设计角度出发,将传动机构放置在支撑轴承内,会明显减小装置轴向尺寸。
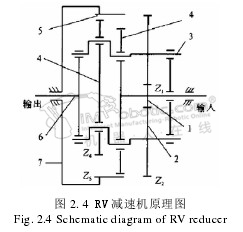
图2.4中,1为太阳轮,2为行星轮,3为偏心轴,4为摆线轮,_5为针齿,6为输出轴,7为针齿壳。
(3)谐波减速机
同行星齿轮传动一样,谐波齿轮传动也是由三个基本构件所组成:固定的内齿刚轮、柔轮、(即其基体与从动轴相连的弹性薄壁套杯“在柔轮开端的母线上做出齿圈”)和使柔轮发生径向变形的波发生器。在刚轮和柔轮上切出模数相同的轮齿,但齿数不同,即柔轮的齿数比刚轮的齿数少两个。谐波传动的齿数差表征柔轮的变形波数。在自由状态(无发生器)下,两轮处于同心位置,而刚轮和柔轮的各齿间隙均匀。装在柔轮内的发生器使柔轮发生径向变形而成为椭圆形。其特点在于结构简单,体积小,质量轻;传动范围大,同时啮合的齿数多;承载能力大;运动精度高;运动平稳;齿侧间隙可以调整;传动效率也高;可实现高增速运动以及差速传动。
目前,工业机器人多应用于RV减速机,因为其承受过载能力强,传动速度大,扭矩也大。而且码垛机器人臂展很长,所以在作业时要求的倾覆力也就大,如果使用其他减速机可能还需要配备其他的机构(比如轴承),所以RV减速机适合应用于此种情况。正是由于RV减速机显著的特点匹配了工业机器人的需求,使得目前RV减速机在工业领域中使用广泛。因此,本文也选择RV减速机。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









