





码垛机器人控制系统的图像形态学处理
时间:2017-12-12
阅读:6928

码垛机器人控制系统的图像形态学处理
4 图像形态学处理
在对图像进行处理时,通过相机采集的图像并不是十分适合,在图像中会出现有噪声,或者一些空白的洞。所以在对这些图像进行处理的时候,可以通过形态学的相关函数对图像进行处理。
图像的形态学处理,主要是通过腐蚀(erosion)与膨胀(dilation)两种方法进行操作的。而其他形态学处理都是基于腐蚀和膨胀的相互组合。
腐蚀:该方法是将目标边界的点进行消除,并同时将边界往内部收缩的过程。腐蚀能够将一些相对不重要的目标除掉。可以将腐蚀概念定义如下:
闭运算是进行目标物体内较小的空洞的填充,将相邻的目标物进行连接、可以平滑目标的边界,同时不对目标物体的尺寸进行明显的修改。
通过腐蚀和膨胀操作能够对目标图像进行目标的分离或者将断开的目标进行连接等处理,但是经过腐蚀和膨胀操作后,都存在会使原先的目标图像的面积发生改变的问题,腐蚀操作后其面积会变小,而膨胀操作后其面积会变大。而开运算和闭运算就是专门为解决这类问题而得出的相应运算。
对二值图像使用形态学处理的过程,其实就是针对集合的运算过程。其实质就是表示了目标物或者是其形状的集合与相对应结构元素之间的互相作用,结构元素的形状就确定了该运算之下的形状信息。图像的形态学处理,就是一种运算,该运算的过程就是将图像中的相应的结构元素进行移动,而后将此结构元素与二值图像进行交、并等集合。

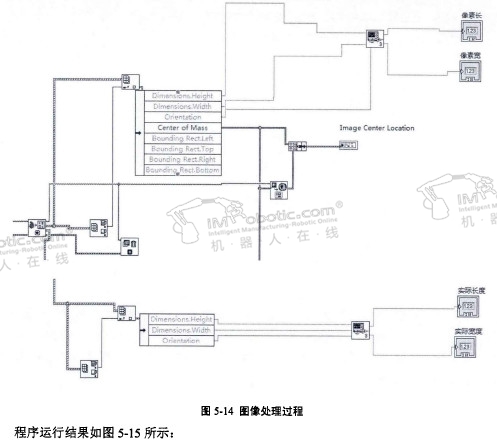
这里通过Labview程序来提取目标图像的质心坐标,其具体过程:在处理好的二值图像上提取所需要的特征信息,我们的实际的目标为箱子,通过图像测得的二维图形即为矩形,其特征信息就就包括矩形的质心(Center of Mass )坐标和矩形长宽尺寸(Dimensions.Height和Dimensions. Width ),这里直接提取的信息为像素值,这里将前面经过标定好的图像信息运用在测量的结果上即可实现像素坐标、尺寸向实际坐标和尺寸的转换,程序如图5-14所示:
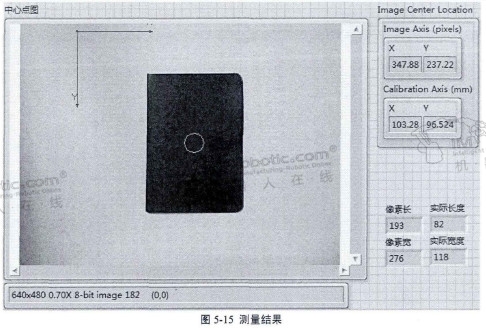
从图中我们可以看到,目标中心即为绿色圆中的红色中心处,此次测量的其像素坐标为(347.88,237.22)单位:pixel,物理坐标值为(103.28,96.524)单位:mm;其长宽尺寸为118mm和82mm。通过实际对目标进行测量,可以验证通过机器视觉所获得的测量结果基本符合实际测量结果,当然也存在一定的误差,这是因为实际测量环境,标定过程,和设备上所引起的,但是都在可控范围之内,所以满足应用的需求。
6 机器人抓取坐标系的建立
要想将机器视觉得到的位置坐标信息和码垛机联系起来,需要建立坐标系的转换矩阵。根据实际情况,将码垛机的坐标系称作世界坐标系A,该坐标系位于码垛机械手起始位置处;在机器视觉系统中所建立的坐标系称为图像坐标系,该坐标系的原点位于标定模板之上,将该坐标系命名为世界坐标系B,所以我们只需要确定世界坐标系A和B之间存在的相互关系,最后将坐标系B中的所有参数转换为世界坐标系A下的参数,如图5-16所示:
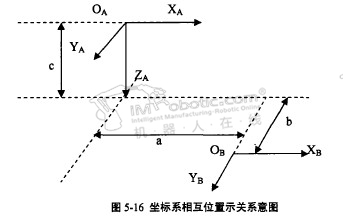
图5-16中所示的是标定板上选定的世界坐标系B与码垛机械手初始位置的世界坐标系A间的相互对应关系,除了坐标系B中没有纵坐标,这是因为视觉系统采用的是单目视觉,测得的是二维坐标,主要在X} Y两个方向上,世界坐标系A与B的X和Y的方向都是一致的,所以这里只需要进行平移即可实现两个坐标系之间的转换。通过下面的矩阵来实现,将坐标系A设置为固定坐标系,可得下式:


机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









