





四轴码垛机器人模型的简化
时间:2017-12-22
阅读:8740

四轴码垛机器人模型的简化
模型简化的原则.
①相似性:我们首先要确保前大臂的主要结构的完整性,即使简化以后也不能影响前大臂的强度。
②可验证性:模型不论进行怎样的简化,在不影响网格划分的质量和结果的前提下都要能顺利地进行有限元分析。
③可恢复性:在我们需要还原显示实体模型时,我们可以通过已有的装配路径来找到原实体。
在针对前大臂的结构简化中,遵循以上三点原则,首先去掉了不影响结构和强度的倒角及小孔等一些辅助特征,去掉了左右侧板等诸多细节零件,主要的零、部件尺寸没有发生改变。
4.7模型的导入
在本文采用的是将UG中建立好的三维模型通过接口直接导入ANSYS,这样可以避免不必要的数据丢失。
①加载模型数据文件
启动ANSYS,打开文件。
②更换工作文件名
1)选取菜单Utility Menu>File>Change Jobname;
2)在弹出的对话框中输入便于我们理解的此次工作的文件名,点击OK按钮确定。
③定义标题
1)选取菜单Utility Menu>File>Change Title;
2)在弹出的对话框中定义此次计算为弯曲工况。
④设置分析类型
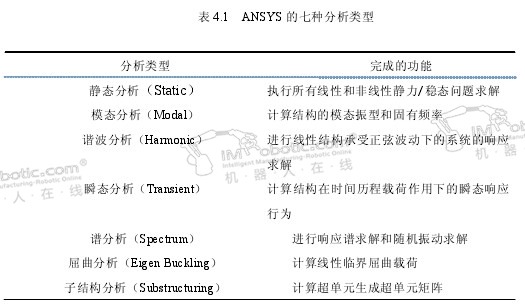
表4.1列举出了ANSYS常用的七种分析类型。在进行分析求解之前,必须定义好求解类型,具体步骤为:
1)选取Main Menu> Solution>Analysis Type>New Analysis命令;
2)选取静态分析Static,点击OK按钮确定。
⑤设置分析类型的选项
在这一步我们主要根据不同的分析类型设置不同的分析选项,其中包括求解器、通用几何非线性等设置选项以及静力学、动力学分析类型的一些专用选项。在我们对结构的静力及模态进行分析时,只需要采用默认设置就可以完美地求解问题。
⑥求解
在完成上述操作后,就可以进行真正的求解步骤:
1)首先选取Main Menu> Solution>Solve>Current LS;
2)然后点击确定按钮,等待计算机完成求解。
⑦对结果进行后处理
在机械结构完成有限元计算后,我们可以通过ANSYS提供的通用后处理模块方便而直观地观测到有限元分析的结果。
进行下述操作,可以得到应力分布图和变形图:
1)首先选则Main Menu>Genneral Postproc > AnalysisType > New Analysis命令,此时弹出对话框;
2)然后选择应力Stress > von Mises选项,点击确定按钮完成。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









