





码垛机械手的设计原理
时间:2018-05-10
阅读:9287

码垛机械手是码垛机上的主要部件,对于它的设计原理你知道吗?当下科技的发展非常迅速,很多行业都会运用到全自动产品,方便快捷,节约成本是消费者喜欢它的主要原因。想要更好的使用码垛机就来一起了解一下,以下就是码垛机械手的设计原理。
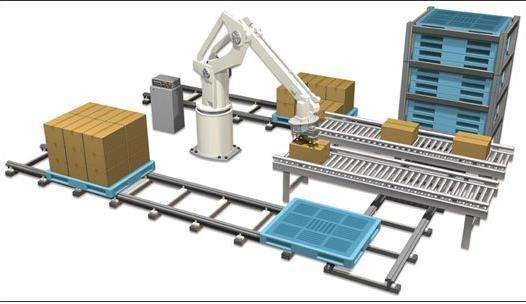
码垛机械手的设计原理是以人的手为基础,以机械拉来实现人的动作,它的动作由以下四部分来实现:自由度的旋转、肩的前后动作、肘的上下动作、腕(手)的动作。
工业码垛机械手的结构是基于模组块系统上的,模组块系统适合于提高移动的速度或特殊类型的工作。在设计上考虑维修的简单性。维修的人员需要具备一定的资格,应能处理一般的机械设备的问题或通常液压件的安装。
该控制系统的设计是可以给操作臂一个信号的动力反馈系统。该工作臂类似一个伸缩仪。在方位、肩部和肘部上的三个轴直接控制位置,利用主臂控制速度。
在码垛机械手的操作柄有一个按钮来控制工作头(降低、翻转、倾斜和抓住的装置)。控制系统的特性是可以使操纵器以一定的速度和精确性进行工作。
在工作过程中,当工件过来后,将光挡住,此时相当输入一个信号系统,手开始抓。然后,码垛机械手开始进行上升,转动和下降运动。
好的码垛机械手价格也很可观,但是大家千万别因为价格的原因,而选择和原机不同牌子的部件,这对整机的使用不是很好。如果大家想了解更多有关于码垛机械的内容,可以关注本网,那里会有专业的服务人员为你解忧。
码垛机械手
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-09-17 16:21:06
- 2018-09-04 11:00:28
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









