





物体分析在ROS中的实现与封装

背景
随着AI 技术的引入,机器人对世界的认知越来越深刻,上一讲中介绍了Movidius NCS物体识别开发包,而实际生活中,对物体的认知远远超出“这是什么”,还需要回答“这个物体离我有多远”, “这是前面看到的那个物体么”,等等。在物体识别的基础上,本文将向您介绍对物体进行进一步分析的ROS开发包的功能及其使用方法,您可以利用它进一步开发机器人的智能应用,比如智能蔽障,构建语义地图等。ROS物体识别项目就是为了解决这个问题而出现的。
项目介绍
1. 软件架构设计
本项目主体由三个ROS发布节点组成,以提供不同方面的分析结果。物体检测节点(Object Detection Node)提供被检测物体的类型和在视觉框图中的2D位置, 物体跟踪节点(Object Tracking Node)提供物体ID来表征当前检测到的物体是不是持续被跟踪的同一物体,物体3D定位节点(Object 3D Localization Node)提供物体在3D空间中的位置信息。下面这张图展示了物体分析模块和其他相关的视觉采集节点(RealSense Node)以及物体检测后端节点的关系。
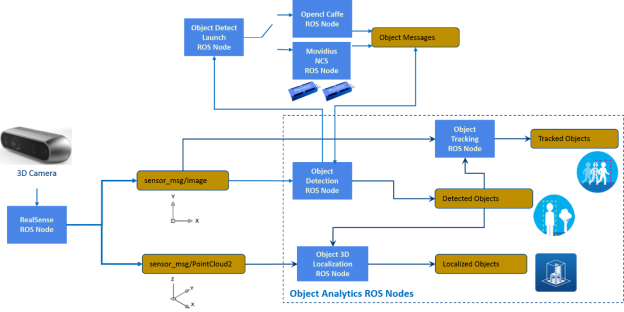
图1. ROS 物体识别架构
2. 运行条件
· 运行Ubuntu16.04的x86_64计算机
· ROS Kinetic
· 可深度学习进行物体识别的ROS节点 (二选一)
·Intel Movidius 神经计算棒节点
·基于OpenCl Caffe的物体识别节点
· RGBD相机
3. 编译与安装
下载源码到本地ROS工作区,切换到最新发布,编译、安装。
4. 运行演示程序

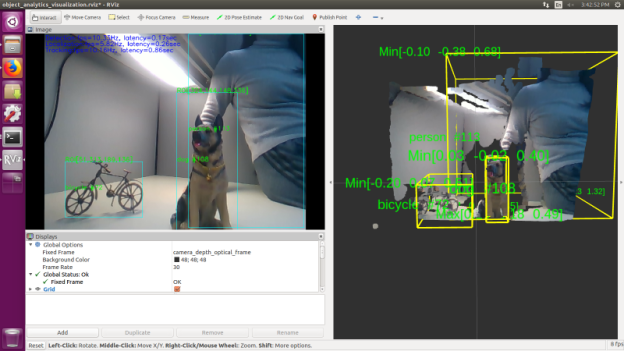
在rviz 中看到的物体识别,跟踪和定位信息如下:
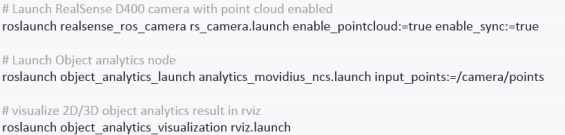
图2. 演示截屏
应用领域
本项目提供的物体检测,跟踪和定位的能力,可以运用于多种机器人使用场景,例如:
1. 3D物体识别与追踪
基于物体在三维空间中的位置,从而对物体进行3D识别与跟踪。
2. 机器人智能避障
传统的机器人采用雷达来检测障碍物,而在高速情况下,对雷达的检测距离和精度要求非常高,高精度的雷达价格动辄上万,基于3D摄像头的方案成本将大大降低。基于物体识别的避障,还能通过指定不同的策略来应对不断变化的场景,使机器人避障更加智能。
3. 基于语义的同步定位与建图(SLAM)
通过将识别出的物体及位置信息,标注在SLAM得到的地图上,可以极好地提高地图的可读性和人机交互的便利性。
展望
本项目目前开发到v0.3.0版本,我们将持续优化计算方案,以达到更好的性能,满足应用中实时性的要求。另一方面,由于ROS2相对ROS具有更好的安全性和实时性,我们计划移植项目到ROS2中。
Intel开源软件技术中心(Open Source Technology Center)将不断推出更多的基于ROS/ROS2开发的新技术,除了介绍过的Movidius神经计算棒,本章介绍的物体识别、跟踪、定位技术,还将陆续推出带有物体信息的语义地图,移动物体检测及避障,Intel 3D RealSense 摄像头的应用,以及ROS到ROS2 的演进,ROS2 的实时及安全性等课题。希望我们在这一领域的工作能给您的项目带来更大的可能性,也希望能得到大家的反馈与建议,甚至发扬开源精神协同开发,使我们能更好地服务于开源社区,推动人工智能技术的发展和应用。

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
灵途科技看2024 CES:“登堂入室”的机器人与科技新基建
关键字: 机器人 人形机器人 2024-01-29 -
CES 2024揭秘: 揭开未来的五大创新趋势
关键字: ces 消费电子 2024-01-16 -
老龄化带来220亿市场,国产医疗机器人谁能杀出重围?
关键字: 国产 医疗机器人 2024-01-10 -
Unitree夺得IEEE Humanoids 2023冠军,在CES 2024盛大登场!
关键字: unitree ieee humanoids ces 夺冠 2024-01-10 -
盘点2023,机器人行业大件事TOP5
关键字: 泰科 人形机器人 仿真机器人 2024-01-04
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2015-08-07 08:00:00
- 2016-07-13 00:00:00
- 2018-12-06 11:47:31
- 2016-07-15 00:00:00
- 2016-07-25 00:00:00
- 2015-08-10 08:00:00
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2018-09-11 10:05:45
- 2024-01-29
- 2024-01-16
- 2024-01-10
- 2024-01-10
- 2024-01-04
- 2023-12-28
- 2023-12-20
- 2023-12-20
- 2023-12-12
- 2023-12-07









