




【收藏】设定ABB机器人工具坐标的方法

随着工业机器人需求量的不断上升,市场上的机器人品牌越来越多,ABB机器人在全球享有极高的声誉,产品质量有保障,超强的性能,为工业生产带来更多帮助。有些用户在购买机器人机器人系统后,对abb机器人工具坐标设定方法并不清楚。今天,就由专业人士为大家具体说说。

设定<a href="http://www.imrobotic.com/integrator/13899/index" target="_blank" title="ABB机器人">ABB机器人工具坐标的方法:
1、TCP(Tool Center Point)工具座标系是机器人运动的基准。
2、机器人的工具坐标系是由工具中心点TCP与坐标方位组成,机器人连动时,TCP是必需的。
3、当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。但是当安装新夹具后就必需要重新定义这个坐标系了。否则会影响机器人的稳定运行。
4、系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,符合右手法则。注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式。
abb机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行。abb机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作。
说明:这里对ABB机器人工具坐标系建立做简单介绍和操作,具体要看实际操作。
一、工具坐标系建立原理
1、工具数据tooldata
工具数据 tooldata用于描述定义安装在机器人第六轴上的工具的TCP(Tool Center Point工具中心位置)、质量、重心等参数数据。一般不同的机器人应用配置不同的工具,比如说弧焊的机器人就使用弧焊枪作为工具,TCP便设置在焊枪枪口处,而用于搬运板材的机器人就会使用吸盘式的夹具作为工具 TCP一般设置在吸盘板中心,夹具时可以设定TCP在夹具加紧产品中心。
ABB机器人在手腕处都有一个预定义工具坐标系,该坐标系被称为tool0。用户自定义的工具坐标数据是根据 tool0的偏移位置所得出的位置数据。
2、工具坐标系原点TCP建立原理
(1)在机器人工作范围内找一个精确的固定点作为参考点,尖锐固定点最佳;
(2)在工具上确定一个参考点作为TCP位置(最好是工具工作参照点);
(3)用手动操纵机器人的方法,移动工具上的参考点,以四种以上不同的机器人姿态尽可能与固定点碰上重合;
(4)机器人通过三个位置点以上的位置数据计算求得工具坐标系原点TCP的数据,将TCP的数据就保存在指定tooldata工具中,为以后编写程序调用。
二、工具坐标系建立方法介绍
1、通过操作机器人来工具坐标系的方法有三种方法:“TCP(默认方向)”、“TCP和 Z”、“TCP和 X ,Z ”三种方法,图片如下:

2、TCP(默认方向)
在定义工具TCP位置时,建立新工具坐标系的原点TCP,而新工具坐标系的方向仍然使用tool0默认方向。新建工具的TCP的X、Y、Z数据是相对于默认tool0的偏移量,工具的方向X、Y、Z轴用默认tool0方向,所以q1=1,q2、q3、q4都是零,其余参数不变。
3、TCP和Z
这种方法建立的工具坐标系,新工具坐标系的TCP数据相对tool0的偏移量,新工具的Z方向要自己根据需求进行定义,X轴和R轴组成平面与新工具Z轴垂直。
4、TCP和X、Z
这种方法建立的工具坐标系,这里的工具坐标系完全由建立时候自己定义,即工具的TCP原点和X轴、Z轴正方向自己定义,Y轴是根据X轴和Z轴自动推理出来。因为立体空间是由原点O、X轴、Y轴、Z轴组成,X轴、Y轴、Z轴三根轴相互垂直。
5、直接输入法
这里这种方法建立工具坐标系是最方便的,可以通过尺子或者其他软件、几何方法等,测量得出工具TCP和默认tool0相对偏移量,然后手动输入到工具对应X、Y、Z等参数中,一般用直接输入法大都使用默认tool0方向,q1=1,q2、q3、q4等参数不变。
三、TCP默认方向工具操作步骤
1、大致操作步骤
(1)TCP建立步骤
ABB菜单——>手动操纵——>线性、基座标系、默认工件wobj0——>工具坐标系中新建工具——>选中新建工具编辑定义——>TCP默认法和4点——>手动操作机器人以尽量不同四种姿态使得工具TCP和外部固定尖点重合并记录点位——>确定得到计算结果不大于3毫米——>确定结果
(2)工具重量重心步骤
选中定义完工具——>编辑、更改值——>下拉找到mass和cog,输入工具重量和重心
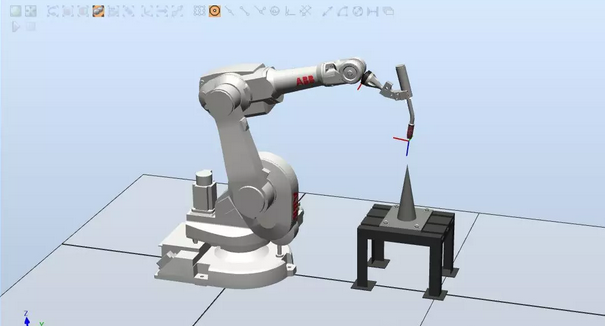
(3)工具坐标系建立的工作站图片
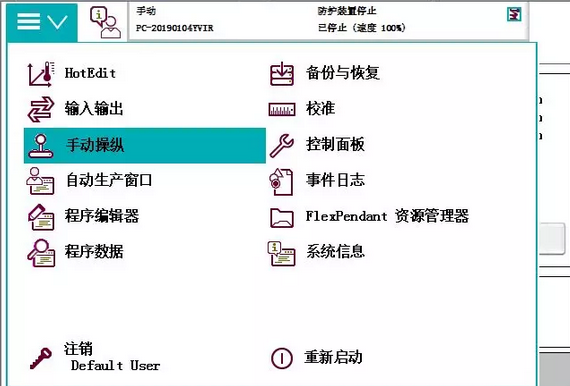
(4)ABB菜单——>手动操纵
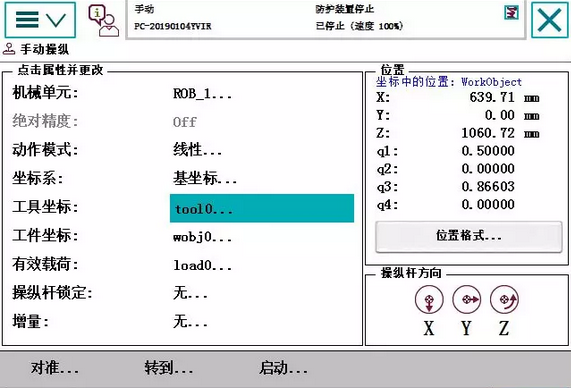
(5)线性运动、基座标系、wobj0坐标系
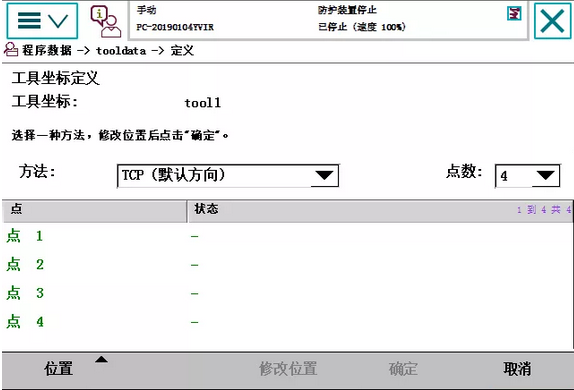
(6)进入工具坐标系并新建工具命名tool1

(6)选择tool1定义

(7)利用TCP默认和4点定义工具tool1
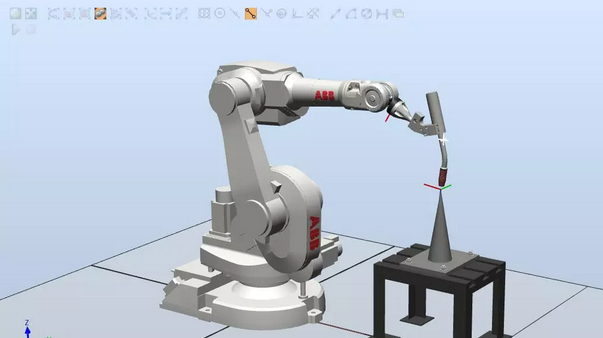
(8)分别把机器人以四种不同姿态到达工具要定义的TCP点和外部尖点重合如下图所示:
姿态点1:
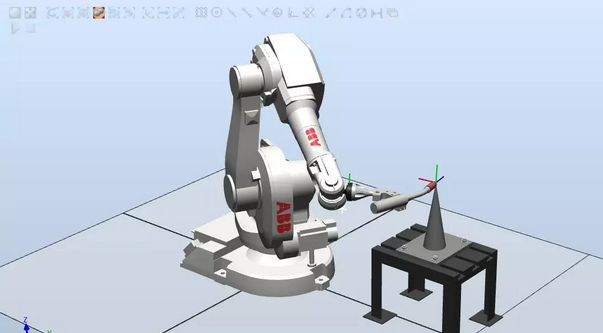
姿态点2:
姿态点3:
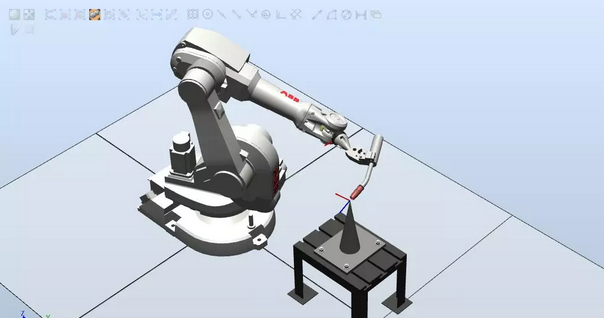
姿态点4:

(9)修改记录位置以后确定
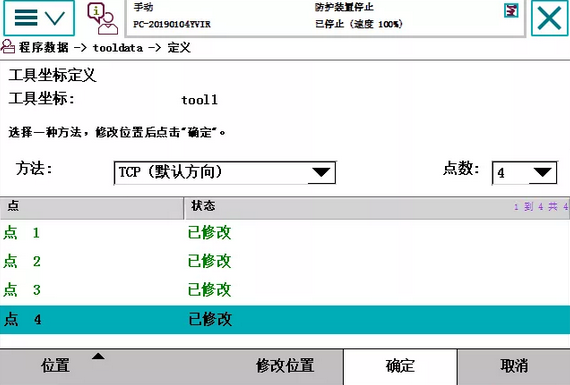
(10)计算结果
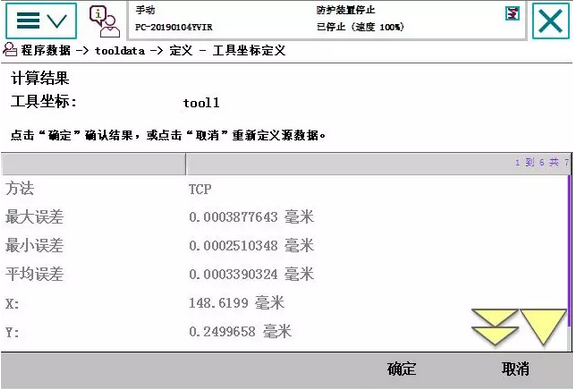
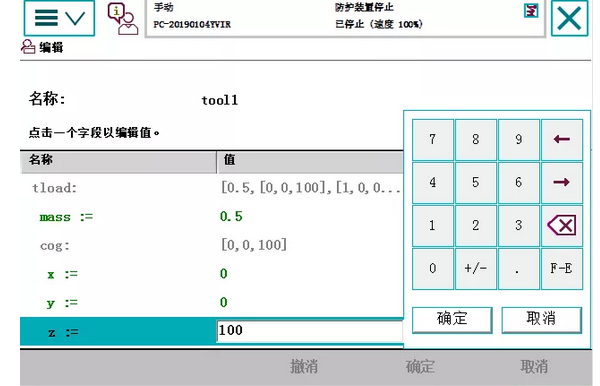
(11)对于新立完成的工具tool1定义其重量、重心的编辑更改值

(12)根据实际尺寸或者给定的数据给tool1输入重量、重心(这里的重心X、Y、Z数据是相对于默认tool0的偏移量数据)
四、验证工具坐标系
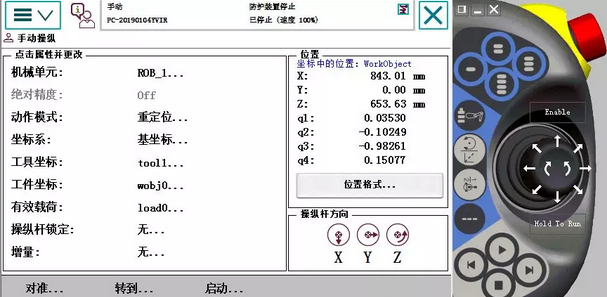
1、坐标系选择
说明:对于ABB机器人工具坐标系验证,这里使用重定位进行验证新建工具的TCP,坐标系统一使用基座标系,因为基座标系可以确定其方向;对于工件坐标系使用默认的wobj0,工具要选择需要验证的工具,如下图验证工具tool1坐标系选择。
2、验证操作
说明:这里操作机器人分别绕着基座标系的X、Y、Z轴做选择运动,观察工具TCP点和外部固定尖点的距离变化。这里利用重定位,就是利用重定位时候,机器人工具TCP点基本不变,然后改变机器人的姿态,验证机器人从不同的姿态时候工具TCP是否精确度满足要求,TCP的质点大小范围;从这里也印证了为什么建立工具坐标系时候,机器人要尽可能地从不同差别姿态,把机器人要建立的工具TCP点和外部固定尖点重合,而且不同姿态点数越多计算越精确。验证时候,机器人只要分别绕着坐标系的X、Y、Z轴做旋转运动,工具TCP和外部固定尖点偏差不要超过实际需要的精度即可。
绕基座标Y轴重定位运动图1:


关于设定ABB机器人工具坐标的方法,就为大家简单说到这里了。随着制造业自动化和智能化程度的不断提升,机器人技术也越来越成熟,适用范围也会越来越广泛。能够解放出更多有用人才投入到创新产品的研发上,从而加快创新产品的上市周期。

好的文章,需要您的鼓励
44

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-24 21:02:58
- 2022-10-14 17:56:03
- 2022-10-23 14:38:05
- 2024-04-11 20:51:04
- 2022-10-24 19:54:03
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









