




-
常用的工业机器人坐标系有哪些?
提问:丝瓜 | 时间:2023-01-29 15:39:37
标签:工业机器人坐标系,工业机器人
回答者:智能小助手 | 时间:2023-01-29 15:39:32
坐标系是设置在机器人或其他空间中以确定机器人的位置和姿势的位置索引系统。
工业机器人上有六种坐标系:大地坐标系、基准坐标系、关节坐标系、刀具坐标系、工件坐标系和用户坐标系。
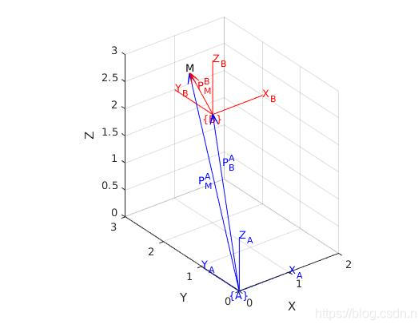
(工业机器人坐标系)
1.地球坐标系。
地球(世界)坐标系是固定在空间中并固定在预定位置的标准直角坐标系。基于坐标系设置用户坐标系。
2.基准坐标系。
基座坐标系由机器人基座的基点和坐标位置组成,是其他机器人坐标系的基础。
3.关节坐标系。
关节坐标系是机器人关节中设置的坐标系,是每个轴相对于其原点位置的绝对角度。
4.刀具坐标系。
刀具坐标系用于确定刀具的位置,包括刀具中心点(TCP)和坐标位置。必须预先设置刀具坐标系。如果未定义默认刀具坐标系,则将替换该坐标系。
刀具坐标系可以通过N(N>=4)点法确定:机器人TCP可以通过N个不同位置与指定点接触获得多组解,并通过计算获得当前TCP的对应位置和刀具安装法兰的中心点(tol0)。坐标系的方向与工具0一致。
5.工件坐标系。
工件坐标系用于确定工件的位置,由工件原点和坐标位置组成。工件坐标系可以通过三种方式确定:点X1和点X2连接形成X轴,X轴与点Y1的垂直线为Y轴,Z轴的方向由右手法则确定。
6.用户坐标系。
用户坐标系是用户定制的每个工作空间的矩形坐标系,用于位置寄存器的示教和执行以及位置补偿指令的执行。大地坐标系将取代没有定义的坐标系。



-
- 关于我们
- 注册新用户
- 会员登陆
- 使用协议
- 联系我们
- 诚聘英才
-
![]()
-
![]()
-
![]()
-
![]()
沪ICP备20024386号-2 沪公网安备 31011402005348
copyright © 机器人在线版权所有. all right reserved.




- 手机站:http://m.imrobotic.com/
- 电 话:400-681-0860
- 邮 箱:sales@imrobotic.com
- 上海市嘉定区翔江公路485号7号楼
-
![]()
服务号:imrobotic
-
![]()
订阅号:im_robotic

