






 询底价/查货期
询底价/查货期
















-

ABB CRB 1100-4/0.58
负载:4KG
工作区域:580mm
-

ABB IRB 660-180/3.15
负载:180KG
工作区域:3150mm
-

ABB IRB 1600-6/1.2
负载:6KG
工作区域:1200mm
-

川崎 duAro2
负载:3KG
工作区域:785mm
-

发那科 ARC Mate 120iD/35
负载:35KG
工作区域:1831mm
-

藦卡 MR25E-1840
负载:25KG
工作区域:1840mm

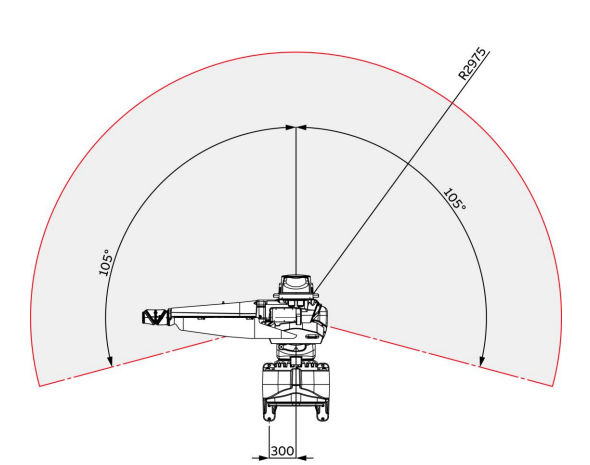
版本 :
喷涂版负载 :
13KG工作区域 :
2975mm轴数 :
7轴安装方式 :
倒挂精度 :
0.15mm防护等级 :
IP67 (手腕IP54)防爆本体重量 :
机器人单元 600kg;机器人控制器 180kg能耗 :
/主要应用 :
喷涂
紧凑的七轴喷涂机器人
IRB 5500-27是创新的IRB 5500机器人家族的新版本。IRB 5500-27集成7轴,使其拥有更大的工作范围和灵活的安装定位,能够支持汽车内外喷涂,以及其他喷涂应用。
主要特点
IRB 5500-27专为移动式生产线的通用支持,以及走停式生产线的增强解决方案而设计,提供更高的灵活性,并可适应不同的车身尺寸,有效减少生产线上所需的机器人数量。这种增强的灵活性与调整机器人安装位置的优势相结合,减少了周期时间。此外,ABB集成控制所有轴的动态模型,降低了总能耗,提高了精度,并确保机器人运动的完全同步和平衡。
节省涂料
ABB紧凑和轻量级的喷涂应用组件使重要的喷涂调节设备,如泵,能够与手腕保持接近15厘米的距离,而这大大减少了更换颜色过程中的喷漆和溶剂的浪费。
除了完全集成的过程控制(硬件和软件),我们还将过程设备集成到IRB 5500 FlexPainter中。IRC5P控制着喷漆过程和机器人运动,从而节省许多能源。
由IPS提供动力
集成在IPS系统中的“推出”功能是一个特殊功能,可以进一步减少油漆用量。
IPS的基本架构建立在将过程控制和运动控制结合为一体的基础上,这简化了系统的设置,节省能源,完善过程。
为喷涂而设计
标准解决方案可容纳多达支持32种颜色循环的换色阀,集成在机器人的工艺臂中。除此之外,该解决方案还包含了由集成伺服电机驱动的两个泵, 64个先导阀,双形并闭环调节的空气雾化控制,闭环调节钟速和高压控制的闭环调节。解决方案可应用于溶剂涂料和水性涂料。当有特殊需求时,该解决方案也可提供更多功能。
喷涂机器人控制系统
IRC5P是专门为涂装车间设计的现代化控制系统。通过集成IPS(集成过程系统)、对用户友好并经过Ex认证的FlexPaint Pendant和RobView 5,它能够提供一系列标准化的功能模块,满足喷涂安装和一些特定需求。这个包包含了用户自定义屏幕、程序编辑和版本控制等标准应用程序。RobView 5也能成为更大的HMI单元控制组件,如ABB FlexUI或其他。



- 第1课 RAPID实用指令精读一
- 第2课 RAPID实用指令精读二
- 第3课 RAPID实用指令精读三
- 第4课 机器人节拍测算指令
- 第5课 RAPID实用指令精读四
- 第6课 RAPID实用指令精读五
- 第7课 RAPID实用指令精读六
- 第8课 RAPID实用指令精读七
- 第9课 错误处理程序
- 第10课 自动测算载荷
- 第11课 程序数据赋值
- 第12课 事件例行程序
- 第13课 模块及参数的导入导出
- 第14课 虚拟信号创建(基于5.XX系统)
- 第15课 虚拟信号创建(基于6.XX系统)
- 第16课 信号逻辑连接
- 第17课 IO程序调用
- 第18课 备份文件说明(5.xx系统)
- 第19课 路径恢复功能
- 第20课 关节轴限位设置
- 第21课 加速度限定
- 第1课 概述
- 第2课 ABB机器人介绍
- 第3课 机器人操作的安全注意事项
- 第4课 如何安装RobotStudio软件
- 第5课 全功能授权版RobotStudio中创建机器人系统
- 第6课 在基本版RobotStudio中创建机器人系统
- 第7课 虚拟示教器状态的切换
- 第8课 设定机器人系统的日期与时间
- 第9课 系统状态信息与事件日志的查看
- 第10课 ABB机器人系统的备份与恢复
- 第11课 ABB机器人示教器的基本操作
- 第12课 ABB机器人手动操纵—单轴运动
- 第13课 ABB机器人手动操纵—线性运动
- 第14课 ABB机器人手动操纵—重定位运动
- 第15课 手动操纵的快捷方式
- 第16课 ABB机器人转数计数器更新操作
- 第17课 ABB机器人通讯介绍
- 第18课 ABB标准IO板的介绍
- 第19课 (5.XX版本)标准板卡651及IO设置
- 第20课 (6.XX版本)标准板卡651及IO设置
- 第21课 新IO模块配置
- 第1课 ABB机器人包装奶酪
- 第2课 ABB码垛及拆垛生产线
- 第3课 ABB树脂应用机器人
- 第4课 ABB低压断路器的组装
- 第5课 ABB激光切割
- 第6课 波纹腹板H型钢的焊接
- 第7课 焊接协作机器人
- 第8课 苏泊尔水龙头打磨
- 第9课 ABB机器人与乐高工程
- 第10课 Chrysler整车
- 第11课 BMW 3系慕尼黑工厂油漆车间
- 第12课 切割机器人
- 第13课 MAR机器人集装箱装载
- 第14课 机器人去毛刺和刷涂曲轴
- 第15课 ABB鼠标工作站
- 第16课 ABB机器人机床上下料
- 第17课 梁组件焊接
- 第18课 ABB机器人制造内饰件
- 第19课 ABB翻新机器人包装啤酒
- 第20课 沃尔沃喷漆和密封创新
- 第21课 ABB机器人码垛
- 第1课 应用介绍
- 第2课 IRB360介绍
- 第3课 VGT系统搭建——系统构成
- 第4课 VGT系统搭建——机器人安装
- 第5课 VGT系统搭建——VGT功能包安装
- 第6课 VGT系统搭建——377板
- 第7课 VGT系统搭建——编码器
- 第8课 VGT系统搭建——视觉安装
- 第9课 VGT系统搭建——纸箱线接线说明
- 第10课 VGT系统搭建——物料线接线说明
- 第11课 VGT调试——简介
- 第12课 VGT调试——纸箱线CountsPeMeter标定
- 第13课 VGT调试——纸箱线输送链基坐标系标定
- 第14课 VGT调试——物料线CountsPeMeter标定
- 第15课 VGT调试——物料线相机系统属性设置
- 第16课 VGT调试——物料线输送链基坐标系标定
- 第17课 VGT调试——物料线调试-相机模型配置—斑点工具Blob
- 第18课 VGT调试——物料线相机输出设定
- 第19课 VGT程序指令介绍
- 第20课 程序模板介绍
- 第21课 常见问题解答
- 任务1-1 清楚安全生产的重要性
- 任务1-2 认识和理解安全标志与操作提示
- 任务1-3 了解工业机器人适用的工业标准
- 任务1-4 工业机器人安全作业的关键事项
- 任务2-1 工业机器人控制柜的故障诊断与维护
- 任务2-2 工业机器人本体维护用的工具
- 任务3-1 工业机器人控制柜的构成
- 任务3-2 工业机器人标准型控制柜的周期维护
- 任务3-3 工业机器人紧凑型控制柜的周期维护
- 任务3-4 控制柜故障的诊断技巧
- 任务3-5 工业机器人控制柜常见故障的诊断
- 任务3-6工业机器人故障代码的查阅技巧
- 任务3-7 工业机器人控制柜电路图解析
- 任务3-8 工业机器人本体电路图解析
- 任务4-1-1 协同型工业机器人YuMi的本体维护
- 任务4-1-2 协同型工业机器人YuMi本体的维护实施
- 任务4-2-1 关节型工业机器人IRB120的本体维护
- 任务4-2-2 关节型工业机器人IRB120本体的维护实施
- 任务4-3-1 关节型工业机器I人IRB1200的本体维护
- 任务4-3-2 关节型工业机器人IRB1200本体的维护实施
- 任务4-4-1 关节型工业机器人IRB1410的本体维护
- 第1问 与各种各样的设备现场总线通讯,如何选?
- 第2问 机器人处理小图形轨迹精度不理想怎么办?
- 第3问 离线程序导入后,轨迹偏差太大,怎么办?
- 第4问 机器人与周边设备有干涉区,怎么办?
- 第5问 工具太昂贵,机器人太“粗鲁” ,怎么办?
- 第6问 某个轴需要不停的高速旋转,怎么实现
- 第7问 机器人路径执行出错了,怎么安全退回来?
- 第8问 根据偏移数据实时调节机器人路径怎么办?
- 第9问 机器人需要视觉辅助定位,该怎么实现呢?
- 第10问 不熟悉示教器界面操作经常点错,怎么办?
- 第11问 机器人运动控制,同时处理数据,怎么办?
- 第12问 高频率读取或写入机器人位置,怎么实现?
- 第13问 输送链不停,机器人怎么跟踪拾取?
- 第14问 需要多个机器人协作加工一个工件怎么办?
- 第15问 机器人能根据所受外力反向运动怎么实现?
- 第16问 机器人装配齿轮时容易卡死,怎么办?
- 第17问 接近机器人时,能自动降速,怎么实现?
- 第18问 应用场景多涉各种各样工艺,该如何应对?
- 第1课 Robotware6的CCLinK创建案例
- 第2课 Robotware6的Profibus创建案例
- 第3课 Robotware6的Profibus创建案例(上)
- 第4课 Robotware6的Profinet创建案例(下)
- 第5课 获取组态配置文件
- 第6课 PLC组态软件配置
- 第7课 Profinet—机器人端配置
- 第8课 Profinet—接口LED灯状态说明
- 第9课 ABB工业机器人串口通信
- 第10课 Socket通讯仿真练习
- 第11课 PC Interface概述
- 第12课 消息队列概述
- 第13课 WebService及OPC及PCSDK概述
- 第14课 套接字概述
- 第15课 与相机应用概述及PCSDK文档介绍
- 第16课 Socket编程示例及答疑
- 第17课 新IO模块配置
- 第18课 集成视觉介绍
- 第19课 软硬件配置
- 第20课 采集、设置图像
- 第21课 标定










