





如何测试通用视觉是否能够连接keba控制系统

之前的文章我们已经介绍了相关Delta并联机器人在包装行业内的应用,关于Delta机器人的优势其中一点就是与先进的视觉技术进行配合。有视觉能力的机器人可以“看见”它们抓取的物体的形状,从而对自己的动作进行调整。这样一来,机器人可以对产品在包装前的摆放位置进行调整。视觉系统还能包装机器人更快的掌握和适应新产品,并对产品质量做出判断。而机器人的视觉系统的关键在于视觉系统本身与Delta机器人的动作控制器的连接。多数的视觉系统都能够提供物体的位置的具体信息,视觉系统和控制器之间的连接非常紧密,精确度高达0.04。随着机器人的设计技术不断发展,一些控制系统可以利用单台照相机提供多个机器人的信息,同时编码器的技术也在进步,一些生产商不断改进软件质量,从而提高机器人的可操纵性。
来自奥地利的keba机器人控制系统在这一方面就非常成熟,其在Delta机器人配合视觉抓取码放项目中拥有非常成熟的技术和丰富的经验,在国内Delta机器人起步阶段,是很多机器人厂商最佳的合作伙伴。
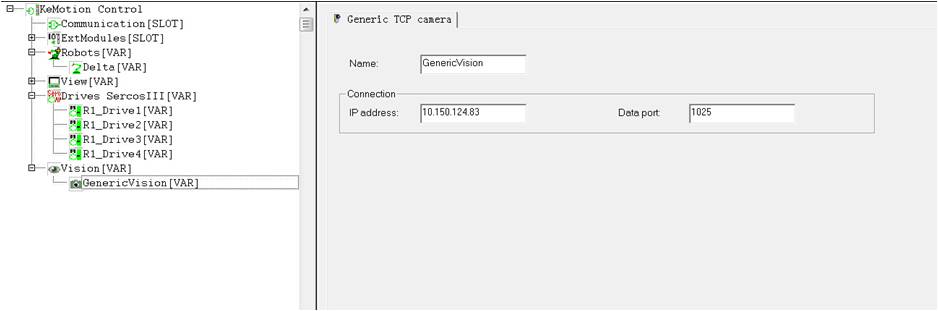
在keba机器人控制系统的keStudio软件中添加一个视觉模块和摄像头,摄像头种类可以分为康耐视摄像头和通用摄像头,这边给大家介绍的就是通用摄像头,这边采用的通用视觉也是通过相对应的通用视觉软件进行报文发送,而并没有连接实际的视觉。
1:首先,我们对视觉摄像头进行配置:
根据实际情况进行选择并将IP地址和端口分配好(这边的IP仿真时是电脑IP,连接真正相机时候为照相机的IP,端口号跟视觉软件端口号对应):
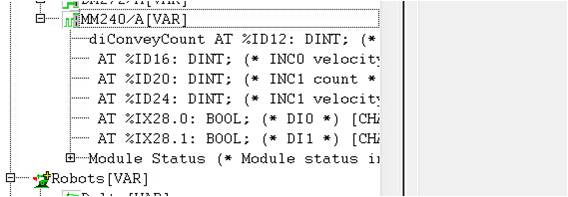
2:MM240的相关配置:
在测试视觉是否能够连接仿真时,并没有用到此项功能,但是由于相应功能块的输入端需要此输入端口,所以还是要先进行配置。
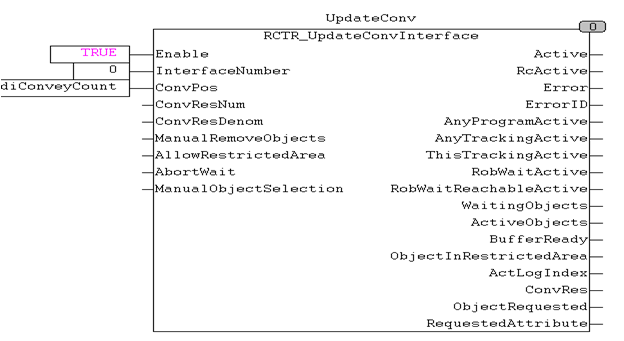
3:仿真传送带的配置:
首先在PLC编程之前,我们需要在Library Manager中添加RcTracking.lib 和 KVision.lib 两个库文件,接着我们在POU中新建一个子程序RCTRUpdateConv中添加功能块-RCTR_UpdateConvInterface并根据实际情况完善。(其中diConveyCount为MM240中配置的编码器的值)
4:视觉功能的配置:
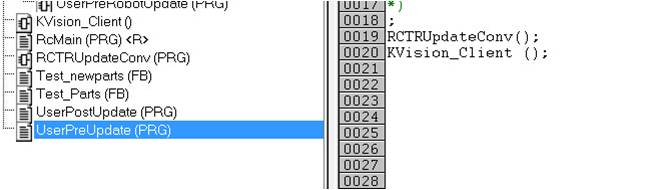
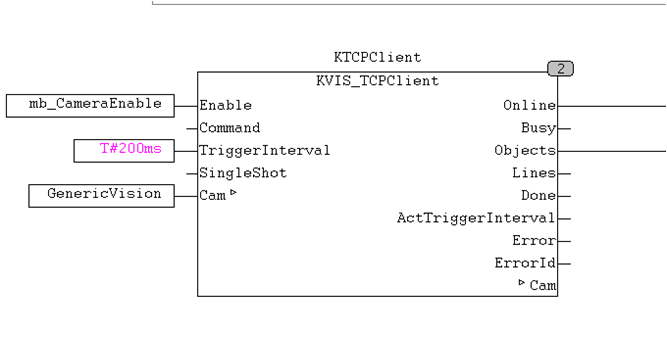
(1)首先我们新建一个KVision_Client的子程序,可以在其他地方(例如 UserPreUpdate)调用它,图中调用了RCTRUpdateConv和KVision_Client2个子程序。
(2)在KVision_Client程序中我们添加通用摄像头视觉功能块-KVIS_TCPClient,并完善,其中mb_CameraEnable变量为相机使能,这个变量也可以一直为True,Cam为摄像头的名字。
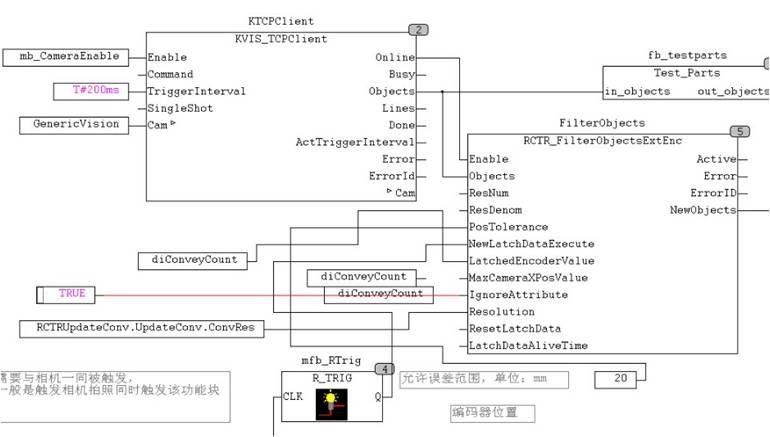
(3)物件在通过拍照范围时候,会被视觉拍到多次,我们必须把同一物件剔除。我们要用到-RCTR_FilterObjectsExtEnc功能块,并将其与之前的KVision_Client功能块相连接,其中PosTolerance为允许误差,NewLatchDataExecute为拍摄时候触发信号,Resolution为传送带编码器精度一种是直接在机械中直接换算得到传送带每走 1mm 的距离,编码器的位置会有多少变化;另一种是通过在 RC 上通过向导示教操作,由系统自动算出精度的汇率。
如果采用第二种方式,该引脚则应该由传送带的 ConvRes 输入。
(4)经过上面的过滤功能块剔除了重复的物件后,就可以通过功能块—
RCTR_AddObjectList 将新的物件交给 RC,让机器人完成物件的跟踪抓取。
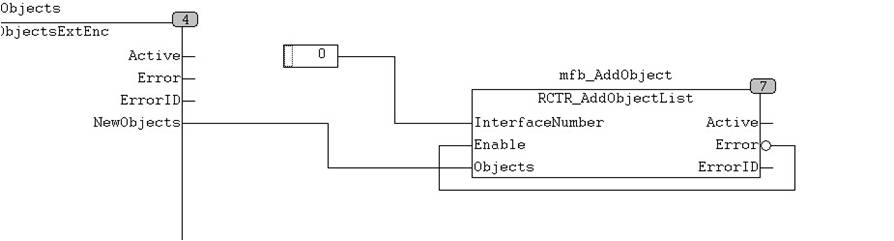
其中“0”与之前提到的仿真传送带的端口对应,至此视觉功能配置完成,接着我们就将程序下载到控制器中。
5:关于keba能接受的报文格式:
Image
[X:254.44;Y:85.98;A:27;ATTR:0]
Done
Image
Done
........
6:RC中新建传送带:
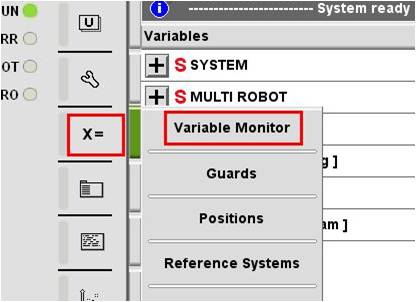
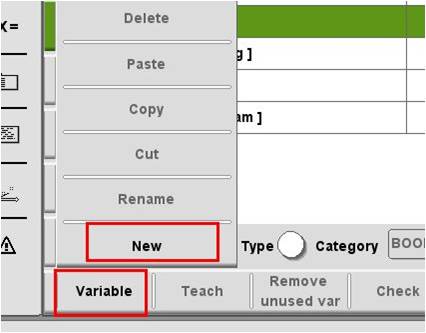
(1)如下图先进入变量列表,点击新建变量:
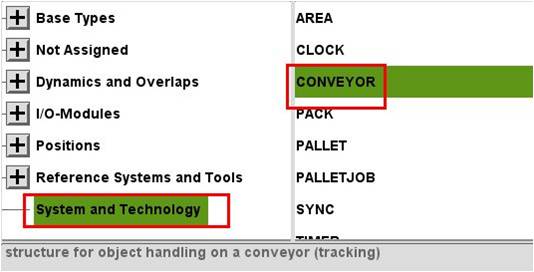
(2)在某个范围内(全局or工程or程序)中新建一个传送带:
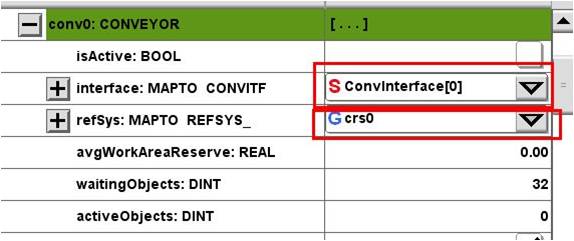
(3)在新建的传送带变量中指定传送带的端口和参考坐标系。
(4)新建传送带变量后,变量列表中会出现Conveyor Tracking标签,点进去:
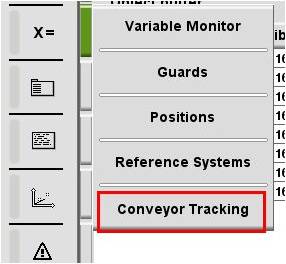
(5)选择对应的传送带变量,点击右下角的diagnosis-object buffer即可观看物件坐标:
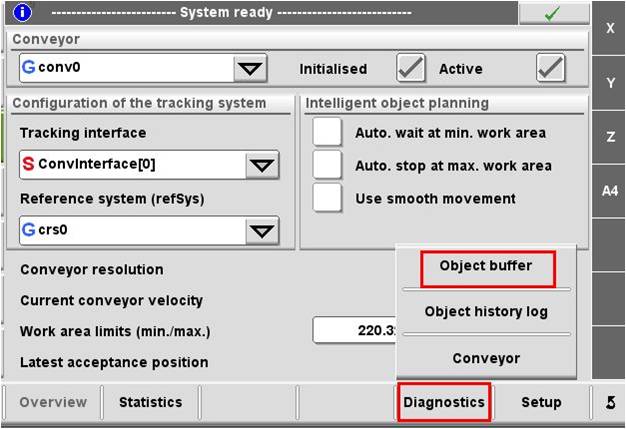

从上图的传送带界面你就可以看到视觉仿真软件发过来的数据值,这样你就能检测这个通用视觉是否能够连接keba控制系统。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
2025两会热议:工业机器人“黄金五年”已来?
关键字: 工业机器人 2025-03-12 -
AI赋能工业机器人,制造业革命,已悄然来临!
关键字: 工业机器人 2025-01-16 -
巅峰对决完美收官!2024年中关村仿生机器人大赛各项冠军出炉!
关键字: 仿生机器人 2024-11-29 -
出海+ | 极智嘉10月全球新动态
关键字: 极智嘉 2024-10-24 -
会议邀请 | 昇视唯盛邀请您参加第8届国际机器人焊接、智能化与自动化会议暨第15届中国机器人焊接会议
关键字: 昇视唯盛 机器人焊接 会议 2024-10-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2016-04-28 00:00:00
- 2016-04-28 00:00:00
- 2019-03-19 21:34:11
- 2016-04-28 00:00:00
- 2025-03-12
- 2025-01-16
- 2024-11-29
- 2024-10-24
- 2024-10-17
- 2024-10-16
- 2024-10-16
- 2024-10-16
- 2024-10-15
- 2024-10-15









