





使用KEBA控制系统实现变位机附加轴的应用
时间:2016-04-28
阅读:9880

变位机是专用焊接辅助设备,适用于回转工作的焊接变位,以得到理想的加工位置和焊接速度。可与机器人、焊机配套使用,组成自动焊接中心,也可用于手工作业时的工件变位。
焊接变位机一般由工作台回转机构和翻转机构组成,通过工作台的升降、回转、翻转使工件处于最佳焊接或装配位置,可与焊接操作机等配套组成自动焊接专机,还可作为机器人周边设备与机器人配套实现焊接自动化。
KEBA的机器人控制系统,不仅能够控制机器人,还能够将外部的变位机一同完美地控制。
对于机器人而言,变位机其实是和机器人运动链系无关的附加轴构成,但是变位机的位姿会影响到机器人的TCP点。
在KEBA的系统中,配置一个变位机是非常容易的,下面以配置一个两轴变位机为例,进行介绍:
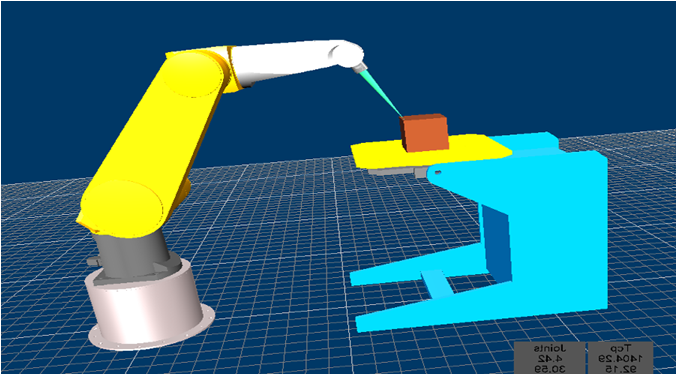
如上图所示,蓝色的工作台是一个两轴的变位机,它可以通过倾斜、旋转动作来配合机器人的运动。
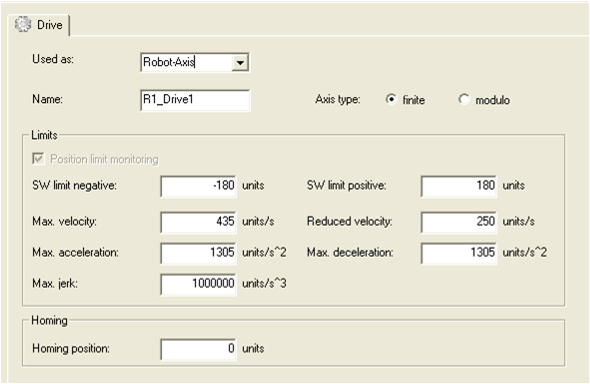
1、首先将附加轴的驱动器信息配置好,附加轴需要作为机器人轴:
2、接着我们需要在系统中配置变位机的一些机械参数:
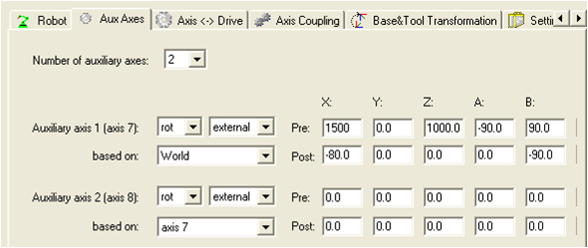
在附加轴的配置页面中配置两个旋转的、external属性的附加轴。其中第二个附加轴(Axis8)的坐标变换参考于前一个附加轴(Axis7)。右侧的坐标栏填入轴的坐标变换信息。
3、然后我们需要确定轴与驱动的关系:

通过以上步骤,变位机的附加轴在系统底层的配置工作就完成了。
4、之后,我们就可以直接在示教器中像对普通的机器人轴一样对其进行点动、示教等操作。
KEBA控制系统

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
2025两会热议:工业机器人“黄金五年”已来?
关键字: 工业机器人 2025-03-12 -
AI赋能工业机器人,制造业革命,已悄然来临!
关键字: 工业机器人 2025-01-16 -
巅峰对决完美收官!2024年中关村仿生机器人大赛各项冠军出炉!
关键字: 仿生机器人 2024-11-29 -
出海+ | 极智嘉10月全球新动态
关键字: 极智嘉 2024-10-24 -
会议邀请 | 昇视唯盛邀请您参加第8届国际机器人焊接、智能化与自动化会议暨第15届中国机器人焊接会议
关键字: 昇视唯盛 机器人焊接 会议 2024-10-17
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2016-04-28 00:00:00
- 2016-04-28 00:00:00
- 2019-03-19 21:34:11
栏目推荐
- 2025-03-12
- 2025-01-16
- 2024-11-29
- 2024-10-24
- 2024-10-17
- 2024-10-16
- 2024-10-16
- 2024-10-16
- 2024-10-15
- 2024-10-15









