





【前沿科技】继三连跳之后,Atlas又一次改变了人型机器人的极限!

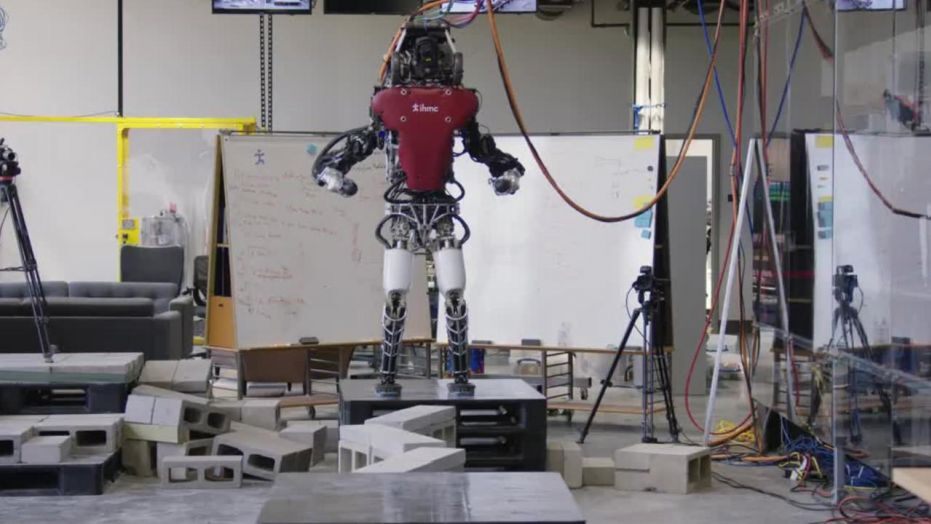
就在几天前IHMC发布了一个新的视频,其中一个视频显示,Atlas机器人正在小心翼翼地,自主穿过各种物体,包括悬挂的木板和摇晃的煤渣块。听起来难度还行?Nonono,这对机器人而言,简直难如上青天。
想要复制人体通过复杂的关节和自然系统维持平衡并穿过障碍物的能力是相当困难的,特别是复制给自主操控的机器人。这项工作十分具有挑战性,并且需要大量的技巧。
波士顿动力公司创造了Atlas,但IHMC机器人公司编写的算法使机器人具有视频中演示的灵活性。
据称,目前Atlas已经成功完成了一半的尝试,但公司已经在努力通过改善机器人的平衡和关节的运动范围来提高这一过程的速度。
IHMC机器人表示他们的机器人使用激光雷达感知下面的地形,是许多自动驾驶车辆导航系统的重要组成部分。机器人还使用“路径规划算法”来跟踪其行程并计划起始地与目的地之间的路线。
“但狭窄的地形对于机器人来说很困难,因为需要做一些双腿‘交替’的步骤,因为髋关节的运动范围有限。所以当一只脚在另一只脚前面时,需要设计一个小的支撑多边形。”
IHMC机器人公司的高级研究科学家Jerry Pratt表示,研究人员致力于创造可以在各种地形上以双足方式行走的人形机器人。他说,尽管有所改进,机器人目前仍然无法与人类达到同一种水平。
Pratt说:“双足和人形的优势在于机动性有可能变得非常好,假如让你设想人类不可以去的地方,实在是不多,我们可以爬山,进入洞穴,徒步穿越雪地还有爬楼梯。”
“这种灵活性的一个原因是人类的脚只有7-10厘米宽,而像有轮子的机器人有33厘米宽。我们相对较小、狭窄的脚让我们能够轻松地绕过狭窄的障碍物,或者跨过障碍物,同时支撑着一个更高的重心,使我们远离地面,在那里我们可以操纵较高的物体。”
双足类人形机器人的灵活性是研究人员创造它的原因,目前还没有类人型机器人被出售用于娱乐、广告和教育以外的应用,但这种情况在不久之后可能会改变。
Pratt相信双足类人机器人可以参与消防队或救援任务,如清理倒塌的建筑物或雪崩现场。
还有一个更异想天开的想法是,当人类在其他星球上殖民时,可以提前发送远程操作的双足雷人机器人,以开发适合人类的栖息地,这将给科学家带来一个巨大的优势。

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









