





详解工业机器人该如何零点校准

详细介绍了工业机器人何时需要零点校准,有几种零点校准的方式。
1、什么时候需要进行零点校准?
a.机器人执行了初始化启动。
b.SRAM 电池(主板)电池电压下降导致 mastering 数据丢失
c.SPC(轴编码器)备份电池电压下降导致脉冲计数丢失
d.在关机的情况下卸下电池盒子
e.编码器电源线断开
f.更换编码器
其中 MASTERING 数据丢失 或者编码器电源断开会出现一下报警
如:SRVO-062(一般是在上电的情况下报错);BZALSRVO-038(脉冲编码器不匹配)
解决步骤:
首先是零点校正菜单的显示,确认系统参数$MASTER ENB(修改方法 MENU SYSTEM F1 Variables)的值是否为 1,1 为显示,MASTER\CALL 菜单在出现 038 报警的时候机器人不能动作首先要消除 038 报警进入 MASTER/CALL 菜单
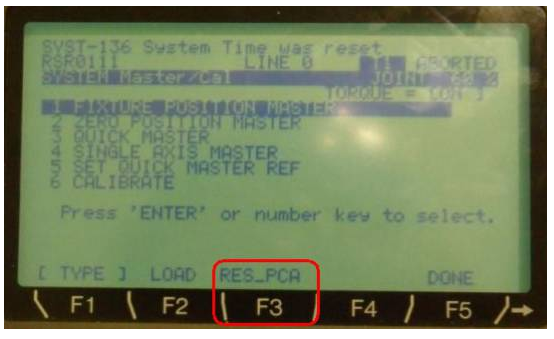
按 F3 脉冲复位,然后在询问 RESET PULSE CODER 中选择 YES关机重启即可消除038 报警。
有时候此时机器人还是不能移动,查看报警列表(MENU_ALARM_F3)查看历史报警信息,发现 075 报警(脉冲编码器无法计数)消除 065 报警时机器人在 JOINT(关节坐标系)下,将报警轴运动(shift+报警轴)20 度左右 ,然后按复位消除报警。
二、零点校准方式
a、零点核对方式
进入 MASTER/CALL 界面
示教各个轴到 0 度位置(每一个运动轴的连接处有两个标签,只要刻线重合 就是此轴的0 度)
选择 2: ZERO POSITION MASTER 然后 ENTER 然后右小角 YES 即可
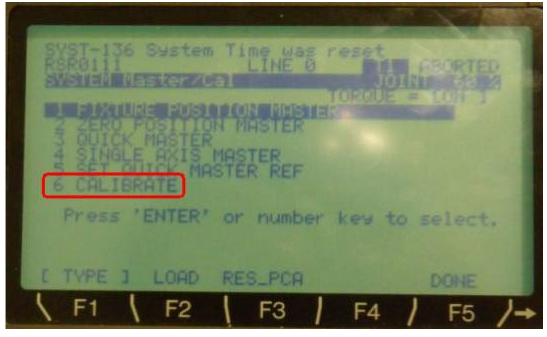
然后务必选择 6 CALIBRATE(校准)YES
b、单轴核对方式
进入 MASTER/CALL 界面
选择 4 单轴校队方式。
将报警轴 SEL 改为 1然后示教报警轴至 0 点 (标记位置)
将报警轴 MSTR POS 输入零
然后点击 F5 执行SET 状态 由 1 自动变为 0ST 状态由 0 变为 2
回到 MASERCALL 界面 选择 6 CALIBRATE (校准)回车然后 YES
c、方法快速核对方式
此方法只适用于意外由于电气或者软件故障丢失零点。机械拆卸不适于此方法,首先要设置快速核对方式参考点。
进入 MASTER/cal 界面将机器人移动到 MASTER REF(核对参考点)位置
选择 5QUICK MATER REF按 ENTERYES 确认此时机器人已经记住了一个快速核对的相对点。
还原的方法,前提是已经做过了 SETTING MASTERING DATA 快速核对方式设定参考点。
进入 MATER/CALL 界面选择 3 QUICK MASTER然后 ENTERYES 即可。
然后务必勿忘记选择 6CALIBRTE校准坐标。
最后,在一般情况下,我们都会建议使用第一二种校准方式,此外,不论是哪一种零点校准的方式,都不能忘记校准(选择6)否则所做的修改将无效。

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-10-22 19:02:49
- 2022-10-18 16:03:58
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









