





MIT线形机器人灵活穿行脑血管,华人教授团队出品

MIT团队开发了一只机器人,在狭窄蜿蜒的通道里,也能快速自如地穿梭。从前,医生直接动手插入导管,碰到急转弯就很难操作,进度缓慢;而磁驱动的机器人,头部可以快速转向,更顺利地到达目的地。
把这样的机器人用在微创手术里,可以降低对医生经验的要求,也可能通过远程控制,在医疗资源匮乏的地区派上用场。它也登上了最新一期的Science Robotics。
人类大脑里,血管又细又曲折,管壁还很脆弱。一旦发生血管栓塞,医生要小心翼翼把导管插到精确的位置,再用激光去除血栓。操作很难一次成功,手术过程漫长艰辛。但现在,MIT团队开发了一只新的机器人,就是这条细长柔软的黑色线体:
黑线型机器人,在狭窄蜿蜒的通道里,也能快速自如地穿梭,大角度转弯都难不倒。
而这项技术的其中一个机密核心是,机器人磁力驱动。
从前,医生直接动手插入导管,碰到急转弯就很难操作,进度缓慢;而磁驱动的机器人,头部可以快速转向,更顺利地到达目的地。
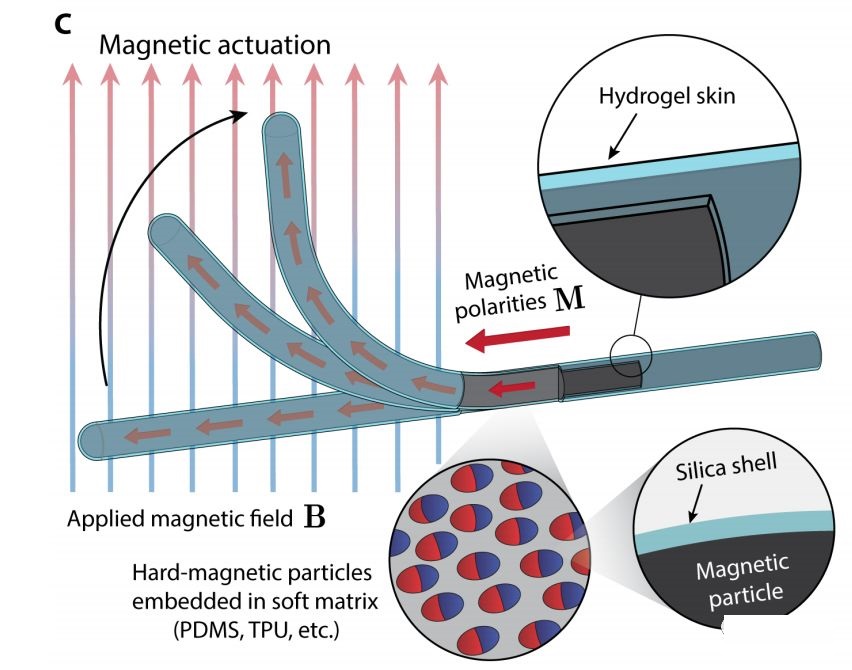
另一个机密,是机器人的水凝胶皮肤,把摩擦力降到了原来的1/10,也是车速加快的关键。
外表柔软,内心坚定。清除血栓,可以变得更快更精确。
把这样的机器人用在微创手术里,可以降低对医生经验的要求,也可能通过远程控制,在医疗资源匮乏的地区派上用场。
外表柔软,内心坚定
团队说,虽然传统的导丝,也是在里面用了金属合金,在外面涂了聚合物;
但这样的材料会产生摩擦力,再加上机械的驱动方式,如果卡在一个狭窄的空间,很容易破坏血管的内壁。
所以,驱动和摩擦,这两个问题都要解决。
首先,团队想到了磁力控制。团队在柔软有弹性的、镍钛合金的油墨 (Ink) 里,加入了钕铁磁:
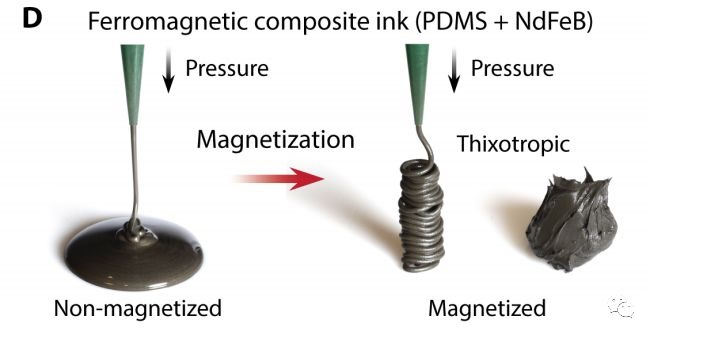
你看,左边是没有额外添加磁性的油墨,画成了一滩泥;右边加上磁性,就站起来了。
这便是机器人内在的材质。下一步要解决外在的皮肤。
开始,团队是用普通的橡胶膏 (Rubber Paste) 来做涂层,但这种材料会影响机器人对磁力的反应。
后来,研究人员选择了水凝胶,它除了不会让机器人对磁力的反应变弱,还拥有平滑的表面,可以把摩擦力降到原来的1/10。
另外,水凝胶的生物相容性,对人体也更加友好。
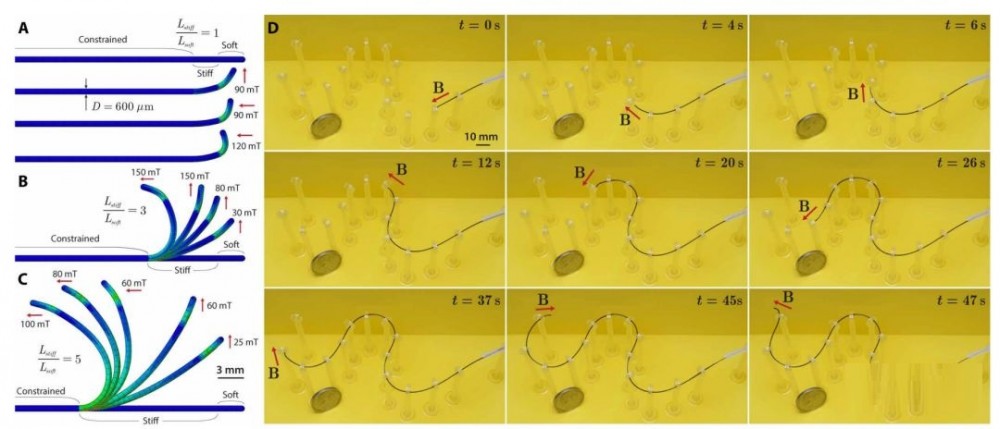
用这两种材质造出的机器人,感受到不同的磁场,就能实现不同程度的转弯:
你看,水凝胶皮肤 (左) 与普通皮肤的机器人相比,速度快了许多:
只要在头部加上激光,就可以用来清除血栓。另外,定点给药也可以达成。
那么问题来了,内外这两种材质,是怎么变成机器人的呢?
这只软体机器人是用3D打印技术制作。
不同于熔融的热塑性聚合物的常规挤压,3D打印不需要通过加热来溶解、流化油墨。磁化油墨的剪切稀化(假塑性)表现使得复合油墨在加压后能轻松挤出,并且屈服应力的存在能使油墨保持形状,形成一条线,而不是变成一滩糊糊。
当需要额外的机械支撑或功能时,可以通过注射成型技术将功能核心结合到机器人的“身体”当中。
此外,由于铁含量高,铁磁合金容易被腐蚀。
了防止嵌入的钕铁硼颗粒在与水凝胶皮肤的水合界面处被腐蚀,研究团队在颗粒周围涂上了一层薄二氧化硅。颗粒形成交联的二氧化硅壳,厚约10nm,能有效地抗击腐蚀。
仍在进化中
甫一出生,这条“线”已经展现出了巨大的潜力。
首尔国立大学软体机器人未来科技中心主任Kyu-Jin Cho评价说:
“这个机器人设计简单,比起传统的商业导管来说,也更稳定,更安全。对于脑科医生而言是能解决大问题的。”
不过,虽然潜力无穷,这个机器人还是进化中的状态。团队表示,未来可期,仍需努力。
首先,团队希望在下一步工作中,给机器人加入精准传感器,实现微流体给药,超声以及电治疗功能。
而更重要的,是实现远程控制。
就像他们一开始所设想的那样,团队希望在这款机器人的帮助下,医生不必靠近放射源,也能在复杂血管中进行快速导航和微创手术。这样一来,就避免了X射线反复辐射对医生造成的伤害。
更重要的一点是,这能让那些身在医疗资源缺乏地区的患者,也能及时接受治疗。
要知道,如果患者能在急性中风的前90分钟得到治疗,生存率能明显提高。
论文一作Yoonho Kim希望结合现有的磁性技术血管手术方法来快速实现这一点。
“现有的技术可以在施加磁场的同时,对患者进行透视检查,如此一来,医生可以在另一个房间,甚至在不同的城市,用操纵杆来控制磁场,引导我们的体内机器人完成手术。”

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-05-14 13:36:48
- 2019-09-27 11:29:38
- 2022-06-27 10:05:41
- 2020-08-17 15:11:43
- 2019-01-25 11:08:57
- 2020-10-16 13:27:55
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









