





布法罗大学研发新型动态抓手,夹鸡蛋、夹面条,像人手一样灵巧?

大多数人类都有展现稳定的握力,这是很理所当然,但换到许多机器身上则显得很有难度,如何展现出动态的抓手来精确地操纵物体显得尤为困难。布法罗大学的研究人员研发了一种双指动态抓手,这种抓手不仅可以改善机器人抓握能力,还可以提高机器人的安全性能。
UB开发的动态抓手使用磁性排斥来调整其抓地力的刚度并吸收碰撞产生的能量。这可以防止这种意大利面条棒等物体破裂。
图片来源:布法罗大学Douglas Levere
机械手的设计使其能够在碰撞期间从冲击中吸收能量。这可以防止机器人手中的任何东西断裂,并且还可以使人们更安全地进行人机协作。
布法罗大学(UB)机械和航空航天工程副教授Ehsan Esfahani博士说,这种动态抓手将成为汽车,3C电子和其他行业装配线中人机协作的得力助手。
“我们的机器人抓手模仿人类手部调整及把握刚度的各种能力,这些夹具设计用于与人合作的协作机器人中。他们将成为人类的帮手,安全,有效。“
原理:磁铁为动态抓手带来柔软触感
Esfahani解释说,磁铁是这款多功能机器人抓手背后的秘密。和一般的抓手有着重要的区别在于,这款机械抓手不是将两个手指固定在适当位置,而是每个动态抓手的手指都有一个磁性底座,位于两个钕磁铁之间,可以排斥或推动手指。
磁铁之间的气隙就像一个弹簧,当手拿起物体或与外力碰撞时产生一点点动力。还可以通过增加或减小磁体之间的间距来调节手柄的刚度。
在一组测试中,工程师在机器人手的指间之间纵向放置了一小块意大利面条。
当夹具撞入固定物体时,该装置检测到施加的外力,这使得磁铁调整其位置,暂时降低夹具的刚度并允许夹具吸收碰撞产生的一些能量。
最终的结果是什么?很意外,意大利面条并没有一丝损坏
未来发展
Esfahani指出,动态夹具他的团队正在开发可以连接到市场上销售的机器人手臂,许多设备已经使用。这可以降低为有兴趣提高现有机器的安全性和能力的公司调整技术的成本。
Esfahani正在成立一家创业公司,将UB的抓手,授权技术商业化。
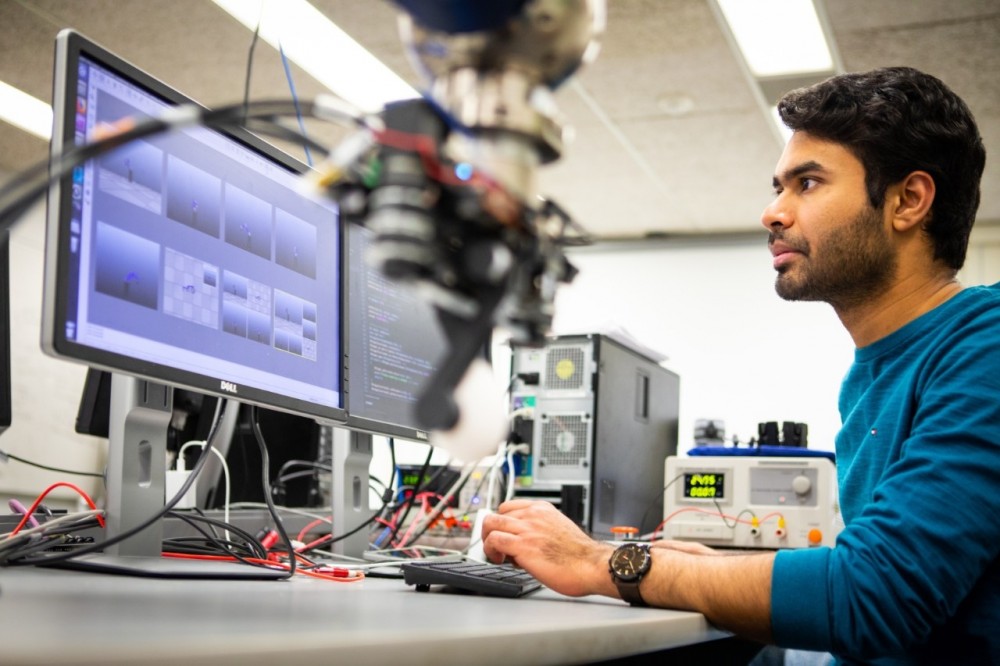
Sri Sadhan Jujjavarapu,UB博士 机械和航空航天工程专业的学生,查看显示机器人抓手如何移动的数字数据。
图片来源:布法罗大学Douglas Levere
他的团队从Buffalo Fund:Accelerator获得了55,000美元,由创新中心资助, 由UB管理,并由帝国开发部门支持 - 进一步开发机器人手。除了完善夹具的当前设计之外,团队还可以探索诸如添加第三根手指之类的进步。
参与设计和测试夹具的研究人员包括博士学位。学生Sri Sadhan Jujjavarapu和Memar是新的意大利面条研究的合着者,他获得了博士学位。来自UB,现在是Facebook Reality Labs的博士后研究科学家。
【相关推荐】

好的文章,需要您的鼓励
1

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2018-11-06 09:00:52
- 2022-06-22 13:37:27
- 2022-05-13 18:13:31
- 2020-06-24 13:39:52
- 2020-05-18 11:37:12
- 2024-01-17 14:09:12
- 2018-07-08 19:00:22
- 2018-09-12 09:05:56
- 2018-09-02 10:00:31
- 2022-09-07 11:59:22
- 2022-09-01 21:17:51
- 2018-09-02 11:00:36
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









