





视频干货:双机器人与变位机编程
时间:2019-10-12
阅读:14277

1如下图,双机器人+变位机系统,使用Multimove,(即一台控制器,一个示教器,三个运动任务)
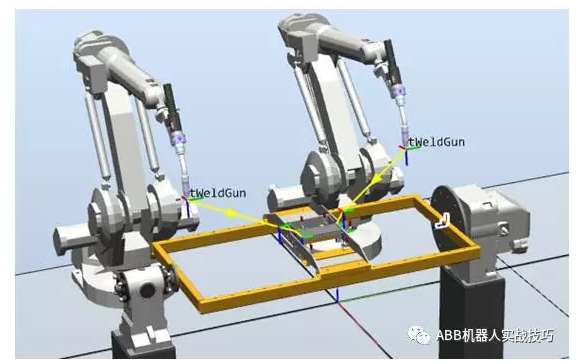
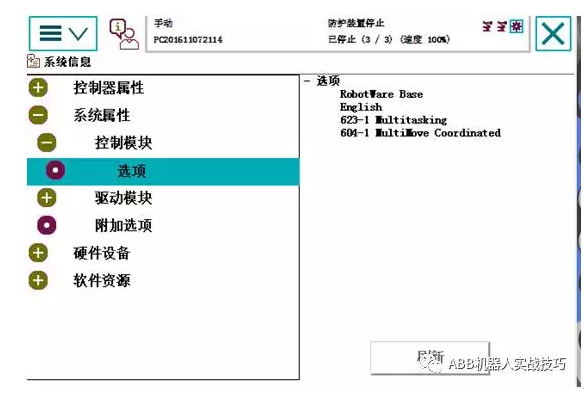
2 机器人需要有multimove选项 604-1或者604-2
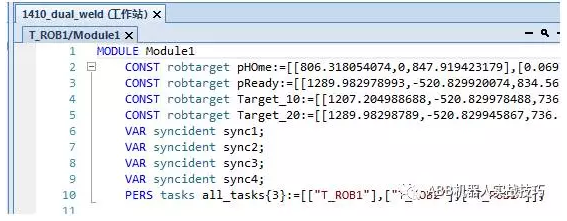
604-1能够实现多机器人在一个坐标系协同运动,604-2只能半联动,即机器人同时开始,过程中各走各的
3多任务生产窗口如下图
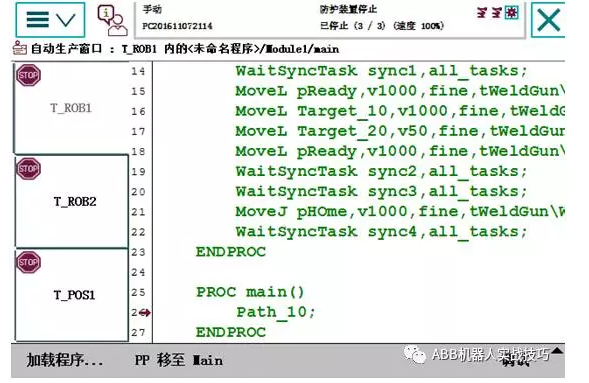
4 运动过程如下:
A) 两台机器人在Home位置,变位机从上料位置转到焊接位置
B) 两台机器人走到准备焊接位置
C) 1#机器人开始焊接第一段,完成后走到ready_1位置
D) 1#焊接完成后,2#机器人焊接,完成后走到ready_2位置
E) 两台机器人一起回各自Home
F) 变位机转到上料位置
5) 要实现多机器人(变位机)间简单通讯,需要在程序数据里各自的任务建立task数据,如下

上图是变位机任务,注意数据必须是PERS,数组内容为三个任务的名称
上图是1#机器人任务
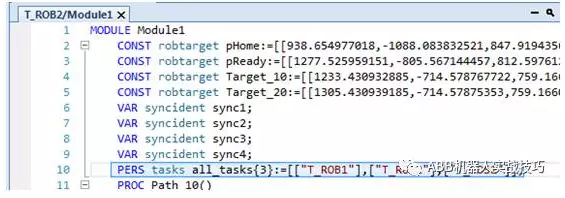
上图是2#机器人任务
6) 多机器人间要相互等待,需要添加数据Sync,如下
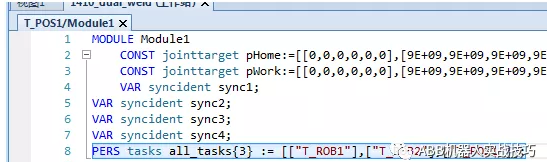
上图是变位机任务里的4个syncident数据syn1,syn2,syn3,syn4
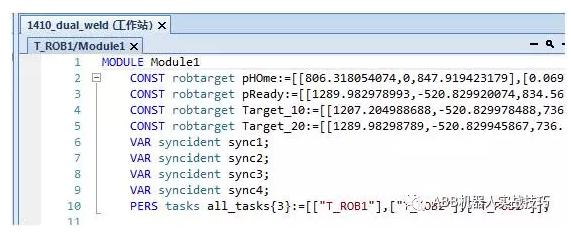
上图是1#机器人任务的4个syncident数据syn1,syn2,syn3,syn4
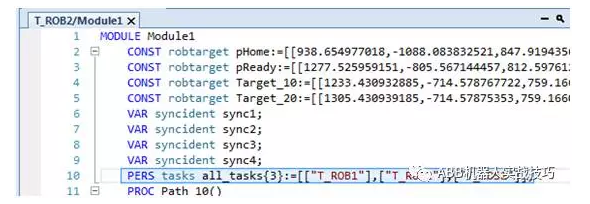
上图是2#机器人任务的4个syncident数据syn1,syn2,syn3,syn4
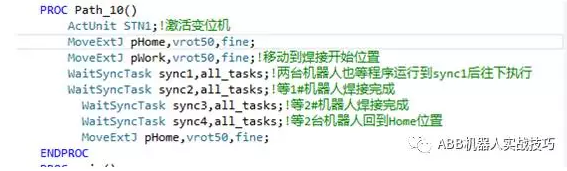
7下图为变位机程序
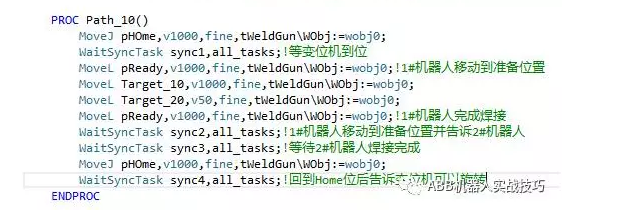
8 下图为1#机器人程序
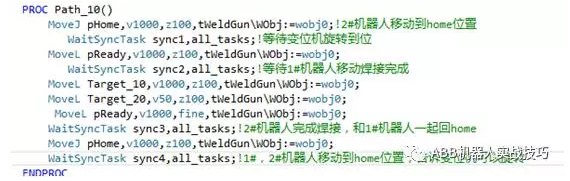
9 以下为2#机器人程序
双机器人
变位机
技术干货

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-11 11:04:05
- 2023-05-01 15:13:05
- 2023-05-01 09:22:04
- 2022-12-23 13:18:57
- 2022-12-28 10:55:21
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









